直流减速电机(MG370)+ TB6612FNG 驱动模块
- 嵌入式开发
- 2026-01-05
- 474热度
- 0评论
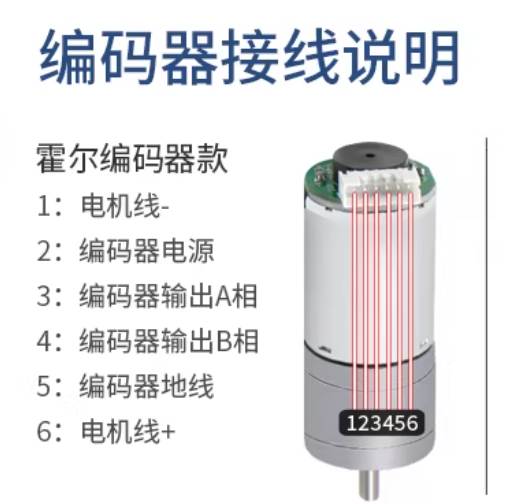
一、直流减速电机(轮趣MG370P34_12V 霍尔编码器电机)
1、资料链接:
https://pan.baidu.com/s/1y1XS6GmnZMquCIRk9muSQg 【WHEELTEC】


电机支架

二、TB6612FNG电机驱动模块
1、简介
TB6612FNG 是一款双路 H 桥电机驱动芯片(Toshiba产),基于 MOSFET 开关设计。它效率高、发热极小、体积小,是用来替代老旧 L298N 的绝佳选择,非常适合驱动小型直流电机或 4 线步进电机。封装:QFN20/SSOP24(小型贴片)
2、核心参数 (Specifications)
驱动通道: 2路(可控制 2 个直流电机 或 1 个步进电机)。
电机电压 (VM): 2.5V ~ 13.5V (建议 12V 以下,最大极限 15V)。
逻辑电压 (VCC): 2.7V ~ 5.5V (兼容 Arduino 5V 和 STM32/ESP32 3.3V)。
输出电流:
连续输出: 1.2A (每通道)。
峰值输出: 3.2A (瞬间脉冲)。
PWM 频率: 最高支持 100 kHz。
保护功能: 内置热关断电路、低压检测电路。
3. 引脚说明 (Pinout)
通常模块引脚分为三类:电源、控制输入、电机输出。
| 引脚名称 | 类型 | 说明 | 备注 |
|---|---|---|---|
| VM | 电源 | 电机驱动电源 (MAX 15V) | 接电池正极 (如 12V/7.4V) |
| VCC | 电源 | 逻辑电源 (3.3V 或 5V) | 接单片机的 5V/3.3V |
| GND | 电源 | 地线 | 必须与单片机共地! |
| STBY | 控制 | 待机控制 | 接高电平(High)芯片才工作;接低电平休眠 |
| PWMA | 输入 | A通道速度控制 | 接单片机 PWM 引脚 (0-255) |
| AIN1 | 输入 | A通道方向控制 1 | 逻辑电平 (High/Low) |
| AIN2 | 输入 | A通道方向控制 2 | 逻辑电平 (High/Low) |
| PWMB | 输入 | B通道速度控制 | 同 PWMA |
| BIN1 | 输入 | B通道方向控制 1 | 同 AIN1 |
| BIN2 | 输入 | B通道方向控制 2 | 同 AIN2 |
| AO1 / AO2 | 输出 | 接电机 A | 无正负之分,反接仅反转 |
| BO1 / BO2 | 输出 | 接电机 B | 同上 |
4. 控制逻辑真值表 (Logic Table)
以 A 通道 为例(B 通道同理),STBY 必须为高电平。
| AIN1 | AIN2 | PWM | 状态 (AO1-AO2) | 动作 |
|---|---|---|---|---|
| H | L | H/PWM | 正电压 | 正转 (CW) / 调速 |
| L | H | H/PWM | 负电压 | 反转 (CCW) / 调速 |
| L | L | X | 高阻态 (OFF) | 自由停止 (惯性滑行) |
| H | H | X | 短路刹车 (Short) | 急刹车 |
口诀:一高一低转圈圈,同高急刹,同低滑行。
5.与L289N对比
| 特性 | TB6612FNG | L298N | 结论 |
|---|---|---|---|
| 内部元件 | MOSFET (场效应管) | BJT (双极性晶体管) | TB6612 技术更新 |
| 效率 | 极高 (内阻小) | 低 (内阻大) | TB6612 更省电 |
| 发热 | 基本不发热 | 发热严重 (需巨大散热片) | L298N 能量都浪费在发热上了 |
| 压降 | 几乎无压降 | 约 2V 压降 | 同样 7V 电池,TB6612 给电机 7V,L298N 只给 5V |
| 体积 | 邮票大小 | 笨重 | TB6612 适合紧凑项目 |
6、注意
- STBY 引脚: 这是新手最容易忽略的。如果不接高电平,电机死活不动。 如果不需要待机功能,直接把 STBY 连接到 VCC。
- 共地 (Common Ground): 电池的负极、TB6612 的 GND、单片机的 GND 必须连在一起,否则控制信号没有参考电压。
- 滤波电容: 既然是控制电机(感性负载),建议在电机两端并联 0.1uF (104) 陶瓷电容,消除火花干扰。
- 电压极限: 尽管标称 15V,但为了安全,输入电压尽量不要超过 12V,否则容易烧芯片。
- 短路保护: 该芯片虽然有热保护,但没有防反接和输出短路保护,接线时务必断电检查。
淘宝购买的模块引脚
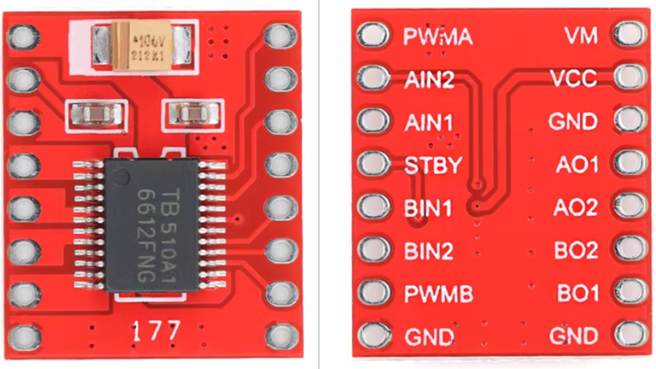
| 引脚名 | 功能描述 | 引脚名 | 功能描述 |
|---|---|---|---|
| PWMA | 通道A的PWM输入,控制电机A转速 | VM | 电机驱动电源输入(最高12V) |
| AIN2 | 通道A输入2,控制电机A方向 | VCC | 逻辑电源输入(5V) |
| AIN1 | 通道A输入1,控制电机A方向 | GND | 地线 |
| STBY | 待机控制,低电平为待机模式 | AO1 | 电机A输出1 |
| BIN1 | 通道B输入1,控制电机B方向 | AO2 | 电机A输出2 |
| BIN2 | 通道B输入2,控制电机B方向 | BO2 | 电机B输出2 |
| PWMB | 通道B的PWM输入,控制电机B转速 | BO1 | 电机B输出1 |
| GND | 地线 | GND | 地线 |
Arduino直流电机PID教程资料