第二篇FreeRTOS任务管理-基础架构与生命周期
- 嵌入式开发
- 5小时前
- 18热度
- 0评论
FreeRTOS 基础架构与任务管理
理解 RTOS 存在的意义,掌握 FreeRTOS 任务的完整生命周期,能独立创建多任务程序。本文从裸机与 RTOS 的对比入手,带你一步步搞懂 FreeRTOS 任务的创建、状态机、调度规则和常用 API。
一、FreeRTOS 是什么?为什么需要它?
1.1 裸机 vs RTOS 对比
| 对比项 | 裸机(前后台系统) | FreeRTOS |
|---|---|---|
| 架构 | while(1) + 中断 |
多任务并发调度 |
| 实时性 | 差(轮询延迟不确定) | 强(抢占式调度,us 级响应) |
| 模块化 | 差(所有逻辑耦合在主循环) | 好(每个任务独立) |
| 适用场景 | 简单控制 | 复杂多任务系统 |
1.2 FreeRTOS 核心特性
- 开源免费,MIT 许可证
- 抢占式 / 协作式 / 时间片 三种调度方式
- 极小内核,ROM < 10KB,RAM 按需分配
- 支持 40+ 架构(ARM Cortex-M、RISC-V 等)
- 2017 年被 Amazon 收购,维护活跃
1.3 FreeRTOS 内核架构
┌─────────────────────────────────────────┐
│ 用户应用(Tasks) │
├─────────────────────────────────────────┤
│ FreeRTOS API(任务/队列/信号量/...) │
├─────────────────────────────────────────┤
│ FreeRTOS 内核(调度器) │
├─────────────────────────────────────────┤
│ 硬件抽象层(port.c / portmacro.h)│
├─────────────────────────────────────────┤
│ 硬件(STM32 等) │
└─────────────────────────────────────────┘核心源码文件:
| 文件 | 作用 |
|---|---|
tasks.c |
任务管理(创建、调度、删除) |
queue.c |
队列(也是信号量、互斥量的基础) |
list.c |
链表(内核数据结构基础) |
timers.c |
软件定时器 |
event_groups.c |
事件组 |
port.c |
硬件移植层(与芯片相关) |
二、任务(Task)—— FreeRTOS 的核心
2.1 什么是任务?
任务可以理解为进程/线程,创建一个任务,就会在内存开辟一个空间。
任务 = 一个独立的 无限循环函数 + 独立的 栈空间 + 优先级
// 任务函数模板
void vMyTask(void *pvParameters)
{
// 初始化代码(只执行一次)
for(;;) // 任务必须是无限循环
{
// 任务逻辑
vTaskDelay(pdMS_TO_TICKS(100)); // 延时释放CPU
}
// 永远不会到达这里
// 如果要删除自己:vTaskDelete(NULL);
}vTaskDelete(NULL) 删除自己。
2.2 任务创建
方式一:动态创建(常用)
TaskHandle_t xTaskHandle = NULL;
BaseType_t ret = xTaskCreate(
vMyTask, // 任务函数
"MyTask", // 任务名(调试用,最大 configMAX_TASK_NAME_LEN)
128, // 栈大小(单位:字,STM32上 1字=4字节)
NULL, // 传给任务的参数
2, // 优先级(0最低,configMAX_PRIORITIES-1 最高)
&xTaskHandle // 任务句柄(可为NULL)
);
if(ret == pdPASS) {
// 创建成功
}方式二:静态创建(不用动态内存)
StaticTask_t xTaskBuffer;
StackType_t xStack[128];
TaskHandle_t xHandle = xTaskCreateStatic(
vMyTask,
"MyTask",
128,
NULL,
2,
xStack, // 用户提供的栈数组
&xTaskBuffer // 用户提供的任务控制块
);- 动态创建:栈和 TCB 从 FreeRTOS 堆中分配,使用方便,但可能碎片化
- 静态创建:用户预先分配内存,不会碎片化,适合安全关键系统(MISRA-C 合规)
- 实际项目中 动态创建居多,安全认证项目用静态创建
2.3 任务状态机 ⭐⭐⭐
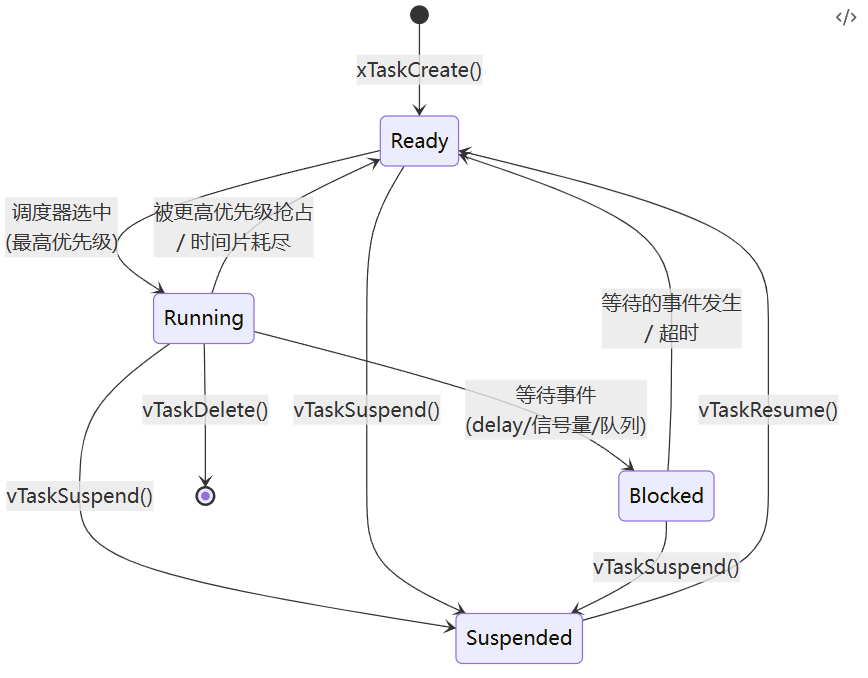
四种状态详解:
| 状态 | 说明 | 何时进入 |
|---|---|---|
| Running(运行态) | 正在使用 CPU | 被调度器选中 |
| Ready(就绪态) | 可以运行,等待 CPU | 创建后 / 被抢占 / 阻塞解除 |
| Blocked(阻塞态) | 等待某个事件 | 调用 delay / 等待信号量 / 等待队列 |
| Suspended(挂起态) | 被挂起,调度器忽略它 | 调用 vTaskSuspend() |
- Running 运行态:CPU 的使用权被该任务占用,同一时间仅一个任务处于运行态。
- Ready 就绪态:任务能够运行(没有被阻塞和挂起),但因同优先级或更高优先级的任务正在运行,暂时没有获得 CPU。
- Blocked 阻塞态:任务因延时、等待信号量、消息队列、事件标志组等原因,主动放弃 CPU 并等待特定事件。
- Suspended 挂起态:类似暂停,通过
vTaskSuspend()挂起后任务不会被调度,只有调用xTaskResume()才能恢复。
- 仅 就绪态 可转变为运行态
- 其他状态的任务想运行,必须先转变为就绪态
- Running → Blocked 是任务主动行为,其他转换都可以是被动的
- Blocked 状态的任务 不消耗 CPU 时间
2.4 任务调度器 ⭐⭐⭐⭐⭐
调度器使用调度算法来决定当前需要执行哪个任务。FreeRTOS 中开启任务调度的函数是 vTaskStartScheduler(),在 CubeMX 中被封装为 osKernelStart()。
调度规则(三条黄金法则):
- 高优先级优先:优先级高的 Ready 任务先运行
- 同优先级时间片轮转:相同优先级的任务轮流执行(需开启
configUSE_TIME_SLICING) - 抢占式调度:高优先级任务就绪时,立即抢占低优先级任务(需开启
configUSE_PREEMPTION)
优先级 3: ████░░░░████░░░░████ ← 最先运行
优先级 2: ░░░░████░░░░░░░░░░░░ ← 优先级3阻塞时才运行
优先级 1: ░░░░░░░░░░░░████░░░░ ← 优先级2也阻塞时才运行
优先级 0: Idle Task(空闲任务) ← 没人运行时才运行pxReadyTasksLists[]),每个优先级一个链表。调度时从最高优先级的非空链表中取第一个任务运行。时间复杂度 O(1)。
2.5 关键配置项 (FreeRTOSConfig.h)
#define configUSE_PREEMPTION 1 // 1=抢占式, 0=协作式
#define configUSE_TIME_SLICING 1 // 1=同优先级时间片轮转
#define configCPU_CLOCK_HZ 72000000 // CPU主频
#define configTICK_RATE_HZ 1000 // Tick频率(1ms一次)
#define configMAX_PRIORITIES 5 // 最大优先级数
#define configMINIMAL_STACK_SIZE 128 // 最小栈大小(字)
#define configTOTAL_HEAP_SIZE (10*1024) // FreeRTOS堆大小
#define configMAX_TASK_NAME_LEN 16 // 任务名最大长度三、任务常用 API 速查
3.1 创建与删除
| API | 功能 |
|---|---|
xTaskCreate() |
动态创建任务 |
xTaskCreateStatic() |
静态创建任务 |
vTaskDelete(TaskHandle_t) |
删除任务(传 NULL 删除自己) |
xTaskCreate 函数原型:
BaseType_t xTaskCreate(
TaskFunction_t pxTaskCode, // 指向任务函数的指针
const char * const pcName, // 任务名字
const configSTACK_DEPTH_TYPE usStackDepth, // 任务堆栈大小(单位:字)
void * const pvParameters, // 传递给任务函数的参数
UBaseType_t uxPriority, // 任务优先级
TaskHandle_t * const pxCreatedTask // 任务句柄(输出参数)
);参数说明:
| 参数 | 说明 |
|---|---|
pxTaskCode |
指向任务函数的指针,任务必须实现为永不返回(即连续循环) |
pcName |
任务名字,主要用于调试,最大长度 configMAX_TASK_NAME_LEN(默认 16) |
usStackDepth |
任务堆栈大小,单位为字(STM32 上 1 字 = 4 字节) |
pvParameters |
传递给任务函数的参数,不需要时传 NULL |
uxPriority |
任务优先级,范围 0 ~ configMAX_PRIORITIES - 1,数值越大优先级越高 |
pxCreatedTask |
用于返回已创建任务的句柄,后续可通过该句柄操作任务 |
返回值:
pdPASS:任务创建成功errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY:堆内存不足,创建失败
vTaskDelete 函数原型:
void vTaskDelete(TaskHandle_t xTaskToDelete);将待删除的任务句柄传入即可删除该任务。当传入 NULL 时,代表删除任务自身(当前正在运行的任务)。
3.2 延时
| API | 功能 |
|---|---|
vTaskDelay(ticks) |
相对延时(从调用时刻开始计时) |
vTaskDelayUntil(&lastWake, ticks) |
绝对延时(固定周期,推荐用于周期任务) |
pdMS_TO_TICKS(ms) |
毫秒转 Tick 宏 |
vTaskDelay(100):从调用时刻起延时 100 tick,实际周期 = 任务执行时间 + 100 tickvTaskDelayUntil(&lastWake, 100):保证两次唤醒间隔恰好 100 tick,不受执行时间影响- 需要精确周期执行(如传感器采样)时,必须用 vTaskDelayUntil
3.3 挂起与恢复
| API | 功能 |
|---|---|
vTaskSuspend(TaskHandle_t) |
挂起任务 |
vTaskResume(TaskHandle_t) |
恢复任务 |
xTaskResumeFromISR(TaskHandle_t) |
在中断中恢复任务 |
3.4 优先级操作
| API | 功能 |
|---|---|
uxTaskPriorityGet(TaskHandle_t) |
获取优先级 |
vTaskPrioritySet(TaskHandle_t, newPriority) |
设置优先级 |
四、实战练习
练习 1:LED 双任务闪烁
// 任务1:LED1 以 500ms 间隔闪烁
void vLED1Task(void *pvParameters)
{
for(;;)
{
HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin);
vTaskDelay(pdMS_TO_TICKS(500));
}
}
// 任务2:LED2 以 200ms 间隔闪烁
void vLED2Task(void *pvParameters)
{
for(;;)
{
HAL_GPIO_TogglePin(LED2_GPIO_Port, LED2_Pin);
vTaskDelay(pdMS_TO_TICKS(200));
}
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
xTaskCreate(vLED1Task, "LED1", 128, NULL, 1, NULL);
xTaskCreate(vLED2Task, "LED2", 128, NULL, 1, NULL);
vTaskStartScheduler(); // 启动调度器,永不返回
while(1) {} // 如果到这里说明堆内存不足
}练习 2:抢占式调度验证
创建 3 个不同优先级的任务,通过串口打印观察执行顺序,验证高优先级抢占行为。
void vHighTask(void *p) { for(;;) { printf("H\r\n"); vTaskDelay(pdMS_TO_TICKS(1000)); } }
void vMidTask(void *p) { for(;;) { printf("M\r\n"); vTaskDelay(pdMS_TO_TICKS(1000)); } }
void vLowTask(void *p) { for(;;) { printf("L\r\n"); vTaskDelay(pdMS_TO_TICKS(1000)); } }
// 创建时:High=3, Mid=2, Low=1五、常见问题
1. FreeRTOS 任务有哪几种状态?画出状态转换图。
Running、Ready、Blocked、Suspended 四种状态。关键转换:
- 创建后进入 Ready
- 调度器选中 → Running
- 调用 delay / 等待信号量 → Blocked
- 事件到达 / 超时 → Ready
- vTaskSuspend() → Suspended
- vTaskDelete() → 销毁
2. FreeRTOS 的调度算法?如何保证实时性?
固定优先级抢占式调度 + 同优先级时间片轮转。通过 **SysTick 中断**(默认 1ms)驱动 Tick,PendSV 中断执行上下文切换。高优先级任务就绪时立即抢占,保证关键任务 us 级响应。
3. 任务栈大小怎么确定?
- 经验值:简单任务 128~256 字,复杂任务 512~1024 字
- 精确方法:用 uxTaskGetStackHighWaterMark() 获取栈剩余最小值
- 影响因素:局部变量大小、函数调用深度、中断嵌套深度
- **进阶**:configCHECK_FOR_STACK_OVERFLOW 可开启栈溢出检测钩子
4. FreeRTOS 最大支持多少优先级?0 是最高还是最低?
由 configMAX_PRIORITIES 决定(默认通常 5~32)。0 是最低优先级(Idle 任务就是 0),数字越大优先级越高。与 STM32 中断优先级(数字越小越高)正好相反!
5. 空闲任务(Idle Task)的作用?
- 优先级 0,系统自动创建
- 回收被 vTaskDelete() 删除的任务的内存(动态创建时)
- 执行空闲钩子函数(vApplicationIdleHook)
- 可用于低功耗处理(进入睡眠模式)
六、更多练习题
6. 如果两个任务优先级相同,FreeRTOS 如何决定谁先运行?
通过 时间片轮转(Round-Robin)调度。每个 Tick 中断到来时,调度器从同一优先级的就绪链表中取下一个任务运行。前提是 configUSE_TIME_SLICING 设为 1(默认开启)。如果关闭时间片轮转,则先就绪的任务一直运行,直到它主动阻塞或挂起。
7. vTaskDelay(0) 会发生什么?
vTaskDelay(0) 等价于 taskYIELD(),即主动让出 CPU,触发一次调度。当前任务不会进入 Blocked 状态,而是回到 Ready 状态。如果没有同优先级或更高优先级的就绪任务,当前任务会立即继续运行。
8. 任务函数中为什么必须有无限循环?如果 return 了会怎样?
FreeRTOS 任务本质是一个永不退出的函数。如果任务函数 return,程序会跳转到未定义的地址,导致硬件错误(HardFault)。正确做法:
- 需要永久运行:用 for(;;) 或 while(1)
- 需要结束任务:在 return 前调用 vTaskDelete(NULL) 删除自己
- FreeRTOS 内部不会帮你"回收"return 的任务
9. xTaskCreate 返回 errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY 怎么办?
说明 FreeRTOS 堆内存不足,无法为新任务分配栈和 TCB。解决方法:
1. **增大堆**:调大 configTOTAL_HEAP_SIZE
2. **减少栈**:检查各任务栈大小是否过大,用 uxTaskGetStackHighWaterMark() 确认实际用量
3. **换内存管理方案**:heap_4 支持碎片合并,比 heap_1/heap_2 更高效
4. **改用静态创建**:xTaskCreateStatic() 使用用户提供的内存,绕过堆分配
10. FreeRTOS 中如何实现一个精确的 10ms 周期任务?
必须使用 vTaskDelayUntil,而不是 vTaskDelay:
```c
void vPeriodicTask(void *pvParameters)
{
TickType_t xLastWakeTime = xTaskGetTickCount();
for(;;)
{
// 任务逻辑(耗时不固定)
DoSomething();
// 保证两次唤醒间隔恰好 10ms
vTaskDelayUntil(&xLastWakeTime, pdMS_TO_TICKS(10));
}
}
```
vTaskDelay(pdMS_TO_TICKS(10)) 的实际周期 = 任务执行时间 + 10ms,会产生累积误差;vTaskDelayUntil 以上一次唤醒时间为基准,自动补偿执行时间,周期精确。
11. configTICK_RATE_HZ 设成 1000 和 100 有什么区别?
| 配置 | Tick 周期 | 调度精度 | 系统开销 |
| :--- | :--- | :--- | :--- |
| 1000 | 1ms | 1ms | 较高(每秒 1000 次中断) |
| 100 | 10ms | 10ms | 较低(每秒 100 次中断) |
- **1000Hz**:适合需要精确毫秒级控制的场景(电机控制、音频采样)
- **100Hz**:适合低功耗或对实时性要求不高的场景(环境监测、UI 刷新)
- 设得越高,CPU 花在中断服务和上下文切换上的时间越多
12. 动态创建的任务被 vTaskDelete 删除后,内存什么时候释放?
分两种情况:
- **任务删除自己**(vTaskDelete(NULL)):任务无法释放自己的栈和 TCB,因为它正在使用中。内存由 空闲任务(Idle Task) 在下次运行时回收。
- **被其他任务删除**(vTaskDelete(xHandle)):TCB 和栈由调用者所在的上下文立即释放。
因此,如果频繁 delete 自己,必须确保空闲任务有机会运行(不能让高优先级任务永远占据 CPU),否则会导致内存泄漏。
七、总结 Checklist
- [ ] 理解裸机 vs RTOS 的核心区别
- [ ] 掌握任务四种状态及转换关系
- [ ] 能独立用
xTaskCreate创建多任务程序 - [ ] 理解抢占式调度的工作原理
- [ ] 区分
vTaskDelay和vTaskDelayUntil - [ ] 完成 LED 双任务实验