HC-SR04超声波测距模块:卡尔曼滤波练习
- 嵌入式开发
- 4小时前
- 14热度
- 0评论
HC-SR04 是一款经典的超声波测距模块,测距范围 2cm ~ 400cm,精度约 3mm。这篇主要不是单纯讲模块怎么用,而是拿它来练一遍卡尔曼滤波,顺便把工作原理、接线方法、MicroPython 实现和中值滤波配合思路一起记下来。
一、工作原理
HC-SR04 模块通过发射超声波并接收回波来测量目标距离,工作频率约为 40 kHz。
模块前方两个探头常被称为“两只眼睛”,一个负责发射,一个负责接收:
- Trig(发射端):发送超声波脉冲,遇到目标后被反射。
- Echo(接收端):接收回波,并输出与距离对应的脉宽信号。
二、参数
| 电气参数 | HC-SR04 超声波参数 |
|---|---|
| 工作电压 | DC 5 V |
| 工作电流 | 15 mA |
| 工作频率 | 40 kHz |
| 最远射程 | 4 m |
| 最近射程 | 2 cm |
| 测量角度 | 15 度 |
| 输入触发信号 | 10 μs 的 TTL 脉冲 |
| 输出回响信号 | 输出 TTL 电平信号,与射程成比例 |
| 规格尺寸 | 45 × 20 × 15 mm |
三、测距过程
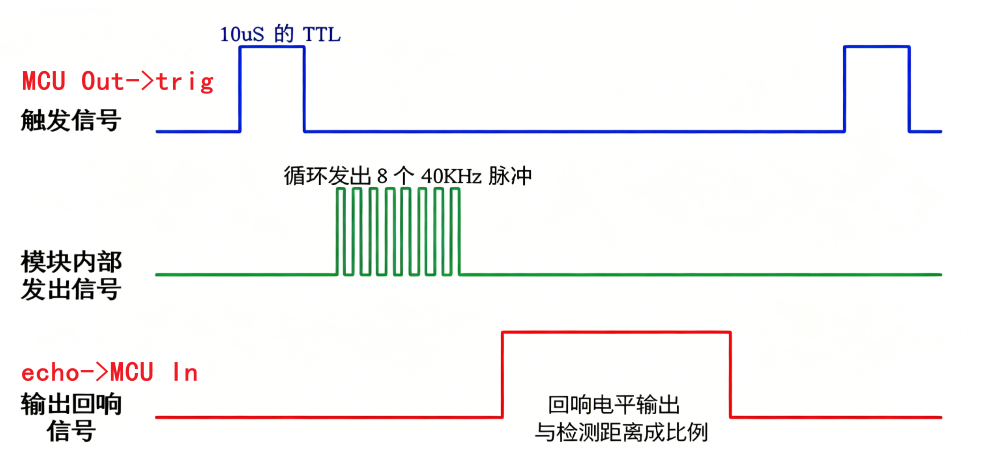
- 触发:MCU 给 Trig 一个 ≥10 µs 的高电平触发脉冲。
- 发射:模块内部发送约 8 个周期的 40 kHz 超声波包。
- 计时:Echo 从低变高并保持,直到回波返回;其高电平持续时间 t 就是声波往返时间。
- 计算:根据 Echo 的高电平持续时间换算距离,超时则视为无回波。
- 节拍:最大有效距离 4 m 时,工程上通常设置 30 ms 超时、60 ~ 100 ms 测量周期,避免回波串扰。
MCU 给 Trig 一个 10us 高电平脉冲后,模块开始发射超声波。Echo 引脚输出高电平,MCU 根据高电平持续时间换算目标距离。
本质上就是:测时间,再换距离。
3.1 距离公式
20℃ 空气中声速约为 343m/s,换算后约为 0.0343 \, cm/\mu s。
d(cm) = t(\mu s) \times 0.0343 \div 2这里除以 2,是因为测到的时间是超声波的往返时间,也就是“去 + 回”。
粗略温度补偿可写成:
c \approx 331.4 + 0.6T \,(m/s)影响测量精度的因素主要有三类:
- 温度因素:温度升高,声速会增加,距离换算结果也会变化。
- 材质因素:布、海绵等软质材料吸声较强,容易让回波变弱,读数偏小或直接超时。
- 入射角因素:目标表面倾斜过大时,反射波可能不会返回接收头,导致测不到目标。
3.2 一次完整通信最长时间
最大测距为 4 m,声波往返距离相当于 8 m,因此最长回波脉宽大约为:
t = \frac{4m \times 2}{343m/s} \approx 23.3ms工程上通常会把超时时间设置为 30 ms,测量周期设置为 100 ms 左右,这样更稳,也能避免前一次回波对下一次测量造成干扰。
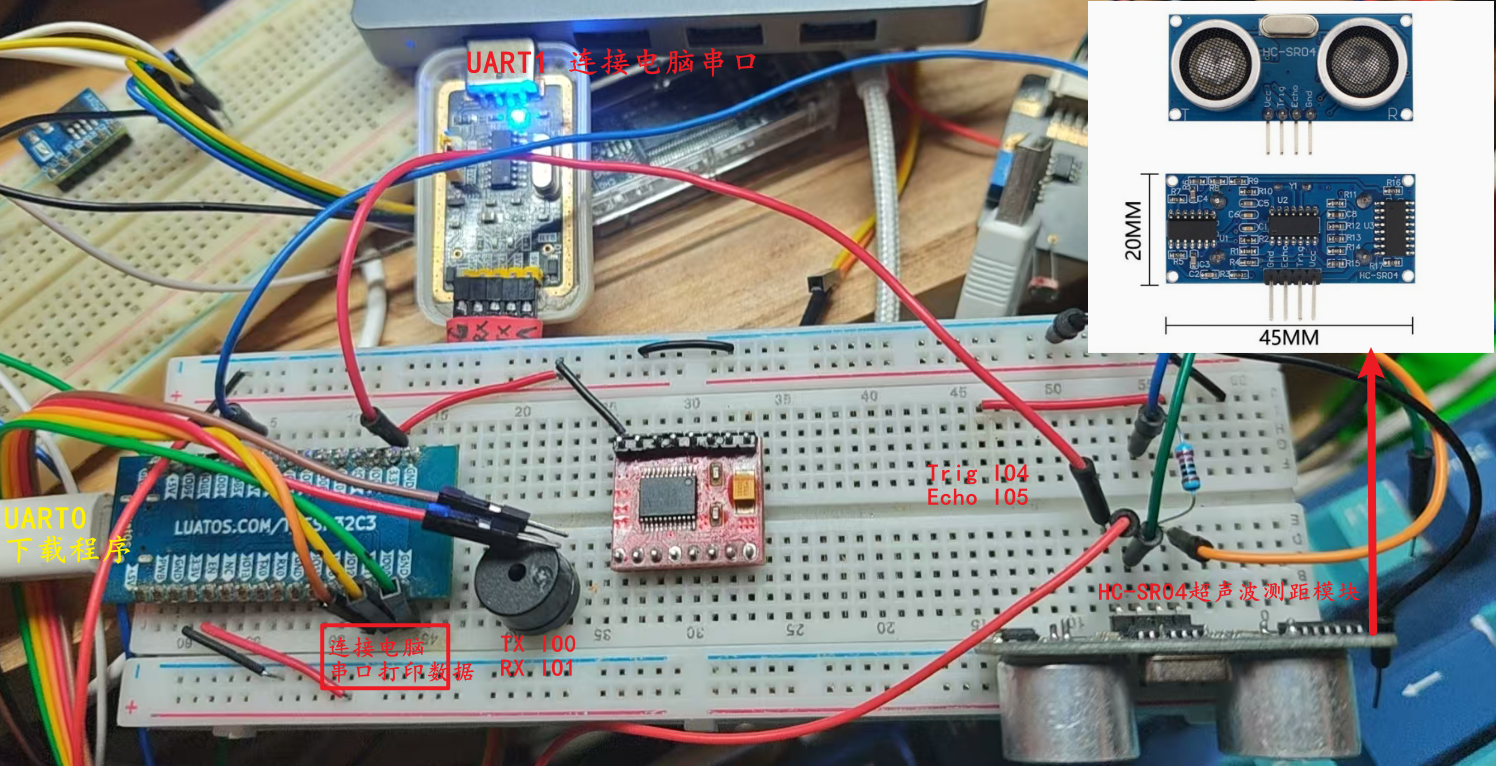
四、接线
| 模块/接口 | 引脚 | 连接到 | 方向 | 备注 |
|---|---|---|---|---|
| HC-SR04 | VCC | 5V | 电源 | 5V 供电 |
| HC-SR04 | GND | GND | 地 | 与 MCU 共地 |
| HC-SR04 | Trig | GPIO4 | MCU → 模块 | 数字输出,≥10µs 触发脉冲 |
| HC-SR04 | Echo | GPIO5 | 模块 → MCU | 5V TTL;3.3V MCU 需分压/电平转换 |
| CH340 | GND | GND | 地 | 与 MCU 共地 |
| CH340 | TXD | MCU RX = Pin(1) | 模块 → MCU | 交叉连接(模块 TX → MCU RX) |
| CH340 | RXD | MCU TX = Pin(0) | MCU → 模块 | 交叉连接(MCU TX → 模块 RX) |
备注:
- 本文 MicroPython 示例使用
trig=GPIO4、echo=GPIO5。 - 3.3V 分压示例:Echo 串
R1=1k,分点到 GND 接R2=2k,分点电压约 3.3V。 - 调试串口(滤波示例中):
UART1 TX=Pin(0)、RX=Pin(1),波特率 115200,用于输出原始值、中值滤波值和卡尔曼滤波值到 VOFA+ 上位机。
五、MicroPython 基础代码
from machine import Pin, time_pulse_us
import time
trig = Pin(4, Pin.OUT)
echo = Pin(5, Pin.IN)
def distance():
# 清Trig
trig.off()
time.sleep_us(2)
# 发送10us的触发脉冲
trig.on()
time.sleep_us(10)
trig.off()
# 计算脉宽
duration = time_pulse_us(echo, 1, 30000)
if duration < 0:
return None
# 换算厘米 343m/s = 343*100cm/1000000us 声速20°空气中约为343
distance = (duration * 0.0343) / 2
print(duration)
return distance
while True:
d = distance()
if d is None:
print("Out of range")
else:
print("Distance: %.2f cm" % d)
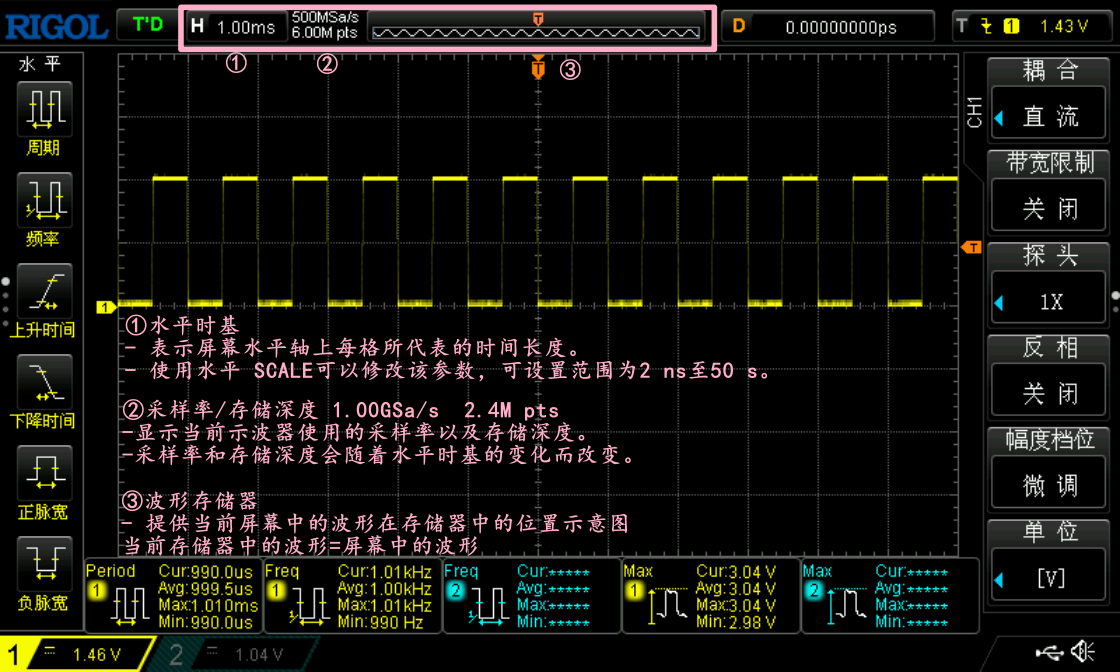
# 一次最长测量时间约:23ms,所以定为100ms测量周期很安全
time.sleep_ms(100)从示波器上可以看到,代码里虽然写的是 10us 延时,但实际测出来大约是 14us。这也说明了 MicroPython 作为解释型语言,在实时性上会受到 解释器执行开销、GPIO 切换开销 和 sleep_us 精度 的影响。
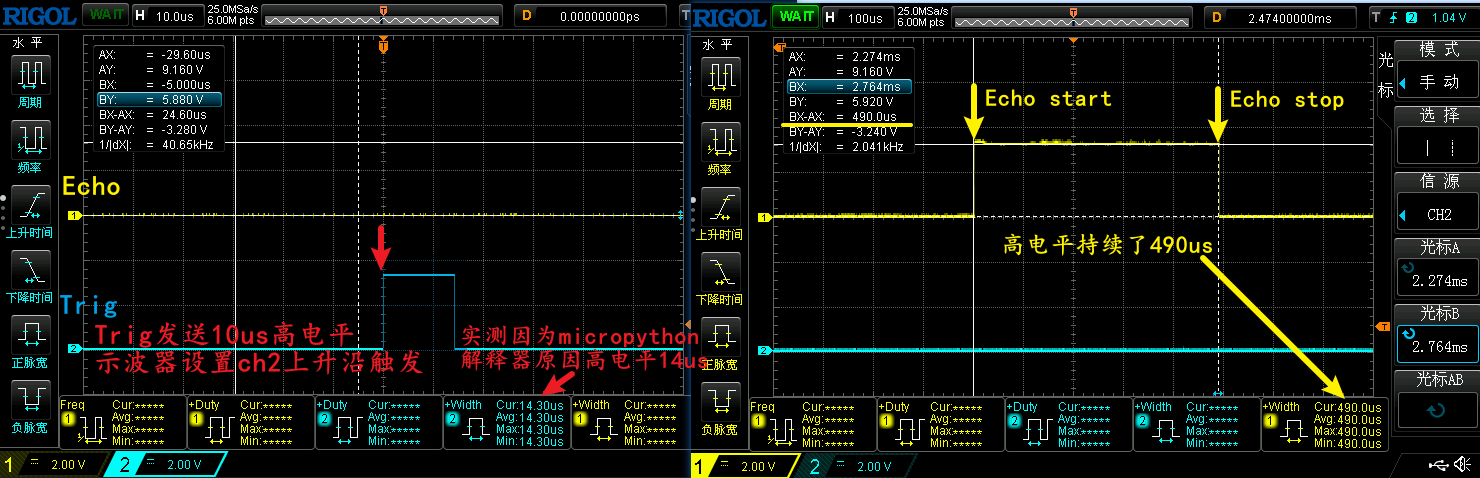
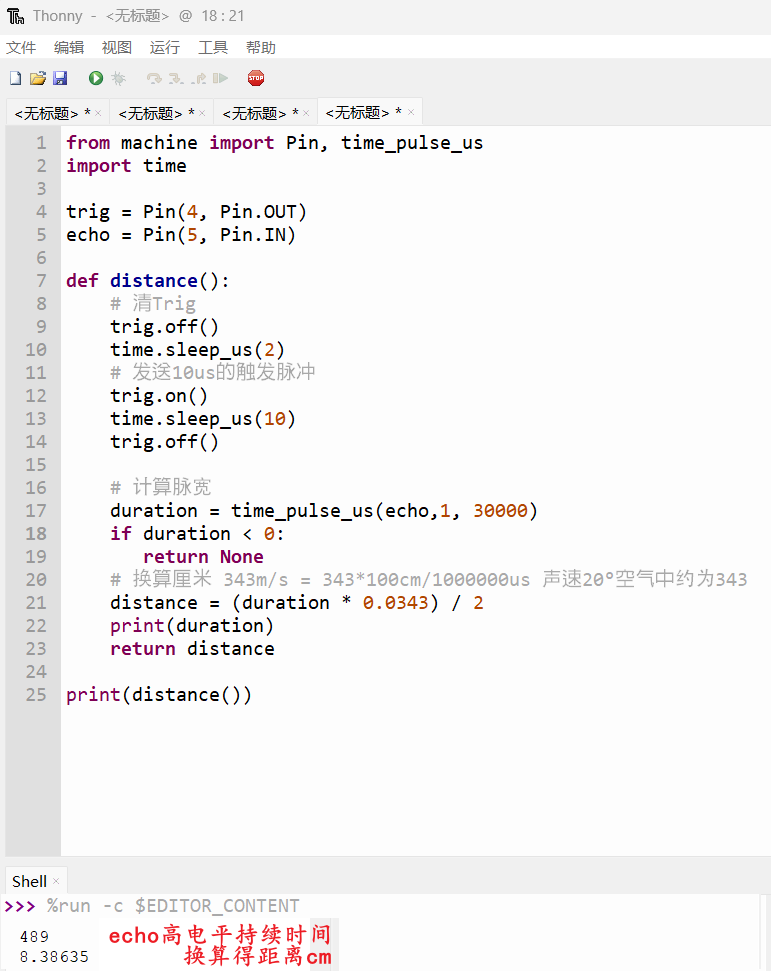
可以看到,代码打印出来的回波时间与示波器测得的 Echo 持续时间是基本吻合的。
六、滤波
超声波测距的原始数据通常会有轻微抖动,所以实际使用时往往需要做滤波。下面按“先理解原理,再看代码”的顺序整理。
6.1 一维卡尔曼滤波
卡尔曼滤波可以简单理解为:先预测,再用测量值修正。
这里把目标距离看成一维状态,并假设相邻两次测量变化不大。
状态模型: x_k = x_{k-1} + w_k
测量模型: z_k = x_k + v_k
其中:
- x_k:第 k 次真实距离
- z_k:第 k 次测量值
- w_k:过程噪声,方差为 Q
- v_k:测量噪声,方差为 R
6.1.1 预测阶段
这里采用的是一维位置模型(常值模型),只关心“距离”这一个状态量,不单独估计速度和加速度。也可以理解为:在相邻两次采样间隔很短时,默认目标位置变化不大,等效近似为速度为 0,因此当前时刻的预测值直接取上一时刻的估计值。
预测方程:
\hat{x}_k^- = \hat{x}_{k-1}预测误差协方差:
P_k^- = P_{k-1} + Q6.1.2 更新阶段
收到当前测量值后,先计算卡尔曼增益:
K_k = \frac{P_k^-}{P_k^- + R}再用测量值修正预测值:
\hat{x}_k = \hat{x}_k^- + K_k\left(z_k - \hat{x}_k^-\right)最后更新误差协方差:
P_k = (1 - K_k)P_k^-6.1.3 调参直觉
- Q 大:响应更快,但结果更容易抖动。
- R 大:结果更平滑,但跟随会更慢。
- 对超声波测距这类场景,如果偶尔出现跳点,通常可以先做中值滤波,再做卡尔曼滤波。
卡尔曼滤波不是单纯把曲线压平,而是在“预测”和“测量”之间找一个平衡。
6.2 只使用卡尔曼滤波
这个版本适合先观察卡尔曼滤波本身的效果:直接对原始测距值进行平滑,也更容易观察 Q 和 R 对结果的影响。
from machine import Pin, time_pulse_us,UART
import time
uart1 = UART(1, baudrate=115200, tx=Pin(0), rx=Pin(1))
trig = Pin(4, Pin.OUT)
echo = Pin(5, Pin.IN)
def distance():
# 清Trig
trig.off()
time.sleep_us(2)
# 发送10us的触发脉冲
trig.on()
time.sleep_us(10)
trig.off()
# 计算脉宽
duration = time_pulse_us(echo,1, 30000)
if duration < 0:
return None
# 换算厘米 343m/s = 343*100cm/1000000us 声速20°空气中约为343
distance = (duration * 0.0343) / 2
print(duration)
return distance
# 卡尔曼参数
x_prev = 0
Q = 0.01
R = 0.2 #测量噪音
P_prev = 1
def klm(zk):
global P_prev,x_prev
# step1: 预测阶段
xk_ = x_prev+0 # 预测状态
Pk_ = P_prev+Q # 预测误差
# step2: 更新阶段
Kk = Pk_/(Pk_+R) # 卡尔曼增益
xk = xk_+Kk*(zk-xk_) # 更新估计值
Pk = (1-Kk)*Pk_ # 更新误差
# 保存值供下次迭代
P_prev = Pk
x_prev = xk
return xk
while True:
dis = distance()
if dis is None:
print("Out of range")
else:
f = klm(dis)
print("raw=%.2f kalman=%.2f" % (dis, f))
# 发给VOFA+
uart1.write("%.2f,%.2f\r\n" % (dis, f))
# 一次最长测量时间约:23ms,所以定为100ms测量周期很安全
time.sleep_ms(100)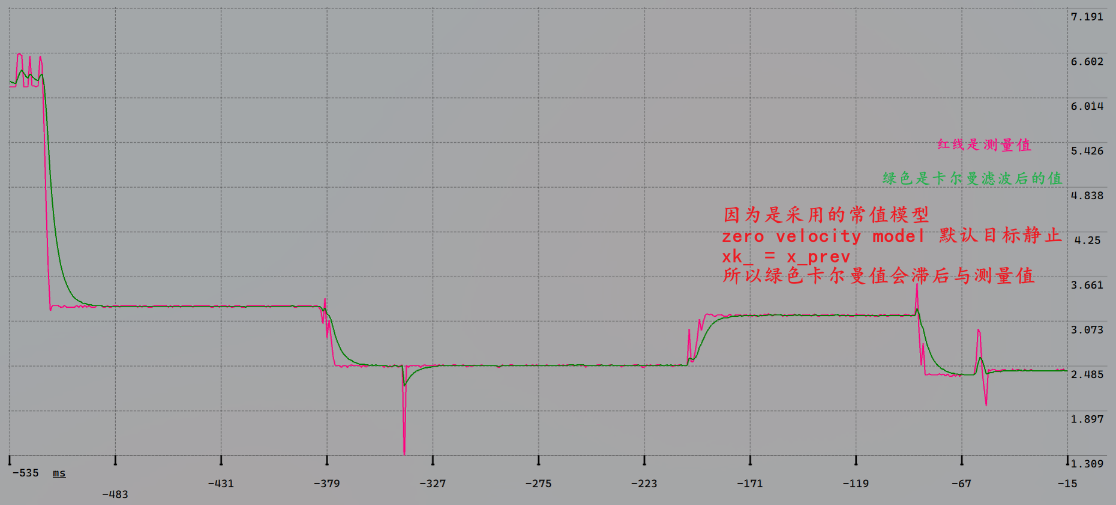
从上位机曲线可以看到,卡尔曼滤波后的曲线明显更平滑,但当目标移动时,滤波值会比原始测量值略有滞后。
1、增大 Q:更相信系统会变化,响应更快,但抖动也会增加。
2、减小 R:更相信测量值,响应更快,但平滑性会下降。
3、升级为二维状态模型:把状态从“只估计位置”改成“同时估计位置和速度”。
如果继续往前走,状态可以扩展为:
- x = 位置
- v = 速度
此时预测关系可写成:
x_k = x_{k-1} + v_{k-1}dt这样目标移动时,滤波器会利用速度项提前预测,因此滞后会明显减小。
6.3 中值滤波 + 卡尔曼滤波
这一版更适合实际使用:
- 中值滤波先去掉偶发离群点。
- 卡尔曼滤波再做连续平滑。
也就是代码流程:先 median_filter(raw),再 klm(mid)。
from machine import Pin, time_pulse_us, UART
import time
uart1 = UART(1, baudrate=115200, tx=Pin(0), rx=Pin(1))
trig = Pin(4, Pin.OUT)
echo = Pin(5, Pin.IN)
def distance():
# 清Trig
trig.off()
time.sleep_us(2)
# 发送10us的触发脉冲
trig.on()
time.sleep_us(10)
trig.off()
# 计算脉宽
duration = time_pulse_us(echo, 1, 30000)
if duration < 0:
return None
# 换算厘米 343m/s = 343*100cm/1000000us 声速20°空气中约为343
distance = (duration * 0.0343) / 2
print(duration)
return distance
# -------------------
# 中值滤波:对连续多次测量结果取中值,消除偶然误差。
# -------------------
buf = []
def median_filter(x):
global buf
buf.append(x)
if len(buf) > 5:
# 当列表元素超过5,则移除buf索引0位置的元素
buf.pop(0) # buf FIFO队列结构,尾部入队,头部出队
temp = buf[:] # 复制数组 浅拷贝
temp.sort() # 排序
return temp[len(temp)//2]
# -------------------
# 卡尔曼参数
# -------------------
x_prev = 0
Q = 0.01
R = 0.2 # 测量噪音
P_prev = 1
def klm(zk):
global P_prev, x_prev
# step1: 预测阶段
xk_ = x_prev + 0 # 预测状态
Pk_ = P_prev + Q # 预测误差
# step2: 更新阶段
Kk = Pk_ / (Pk_ + R) # 卡尔曼增益
xk = xk_ + Kk * (zk - xk_) # 更新估计值
Pk = (1 - Kk) * Pk_ # 更新误差
# 保存值供下次迭代
P_prev = Pk
x_prev = xk
return xk
while True:
raw = distance()
if raw is not None:
mid = median_filter(raw) # 先中值
kal = klm(mid) # 再卡尔曼
print("raw=%.2f mid=%.2f kal=%.2f" % (raw, mid, kal))
uart1.write("%.2f,%.2f,%.2f\r\n" % (raw, mid, kal))
else:
print("Out")
# 一次最长测量时间约:23ms,所以定为100ms测量周期很安全
time.sleep_ms(100)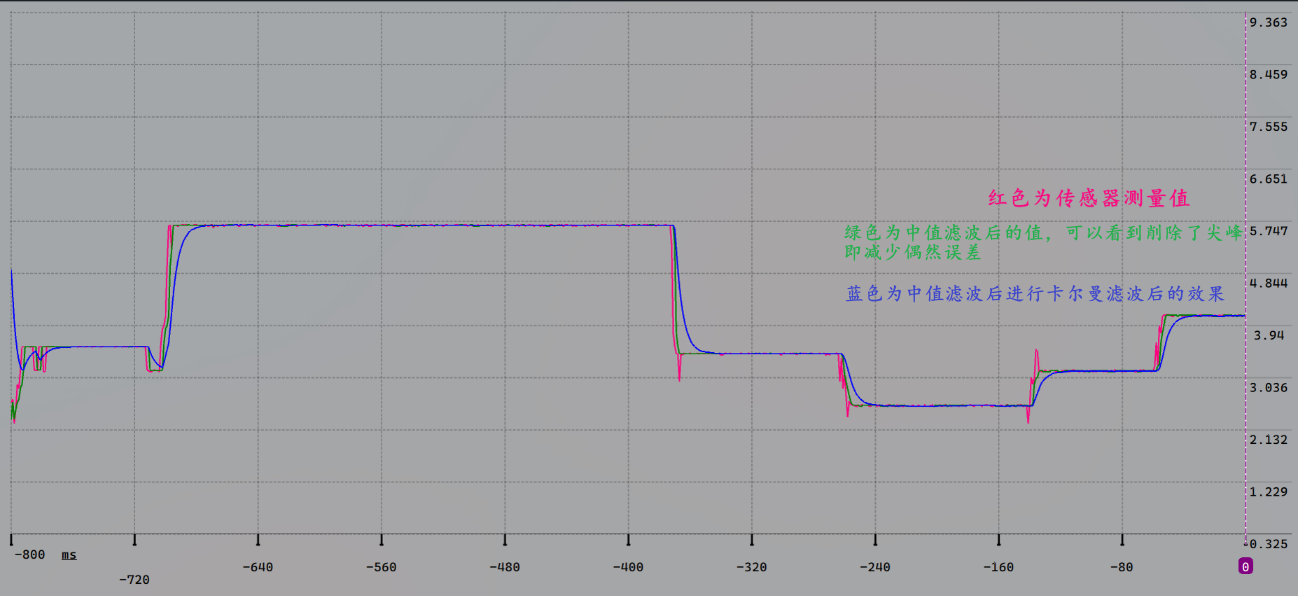
七、总结
HC-SR04 的核心不复杂,关键点主要有四个:
- Trig 负责触发,Echo 负责输出脉宽。
- 距离计算本质是测回波时间,再按声速换算。
- 工程上要注意 5V 电平、超时设置 和 测量周期。
- 如果需要更稳的曲线,通常可以采用中值滤波 + 卡尔曼滤波的组合方案。


 林峰
感谢评论!后续我会及时整理FreeRTOS和FOC的笔记发布,因为我要先自己理解消化,期待和您一起进步
林峰
感谢评论!后续我会及时整理FreeRTOS和FOC的笔记发布,因为我要先自己理解消化,期待和您一起进步
