C语言进阶:双向循环链表与哨兵头节点 C语言进阶:双向循环链表与哨兵头节点 双向循环链表与哨兵节点是嵌入式 C 语言开发中最实用的链表组合。链表通过指针串联离散内存节点,弥补了数组在插入/删除上的不足。本文重点讲解双向循环链表与哨兵头节点设计——这是嵌入式系统中最常用的链表形态。 一、数组 vs 链表 特性 数组 链表 内存布局 连续,随机访问 O(1) 离散,需遍历 O(n) 插入/删除 需移动数据 O(n) 只改指针 O(1) 大 C语言进阶 林峰 2026-03-30 244 热度 0评论
MQTT 协议详解:Topic、QoS、遗嘱消息与保留消息 MQTT 协议是物联网场景中应用极广的轻量级消息协议,基于发布/订阅模型,专为低带宽、不稳定网络和资源受限设备设计。本文按「协议定位 → 连接存活 → 消息可靠性 → 异常断线 → 状态同步」的顺序,系统梳理 MQTT 协议的五个关键工程机制:Topic 设计、Keep Alive、QoS、遗嘱消息和保留消息。 ℹ️ 先抓住五点 MQTT 是应用层协议,工作在 TCP/IP 之上 它以 Broke Linux系统 林峰 2026-03-29 1160 热度 0评论
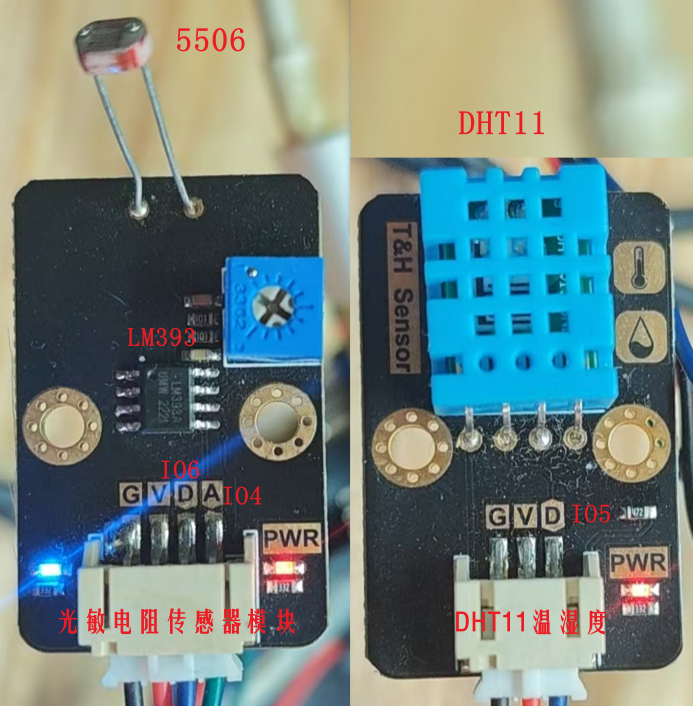
通信协议篇一:温湿度传感器 DHT11单总线时序详解 通信协议篇二温湿度传感器 DHT11 的时序是理解这个模块的关键。只要搞懂单总线空闲高电平、主机起始信号、传感器响应信号,以及 40 位数据格式,就能更轻松地看懂逻辑分析仪波形,也能理解 ESP32 / MicroPython 代码为什么这样写。 dht11 sensor module overview ℹ️ 核心结论:DHT11 的 DATA 单总线在空闲状态下保持高电平。主机先拉低总线发起通信 嵌入式开发 林峰 2026-03-28 780 热度 0评论
C语言结构体:定义、访问、指针、嵌套 C语言结构体是 C 语言中最常用的复合数据类型之一。它不仅能把多个不同类型的数据组织成一个整体,还经常出现在函数传参、链表设计、设备寄存器映射、通信协议解析等场景中。理解结构体,基本就掌握了 C 语言中“描述复杂对象”的核心手段。 一、C语言结构体是什么? C语言结构体是一种用户自定义的数据类型,可以将多个不同类型的数据组合在一起,形成一个逻辑整体。它特别适合描述一个对象的多种属性,比如学生的姓名 C语言进阶 林峰 2026-03-26 735 热度 0评论
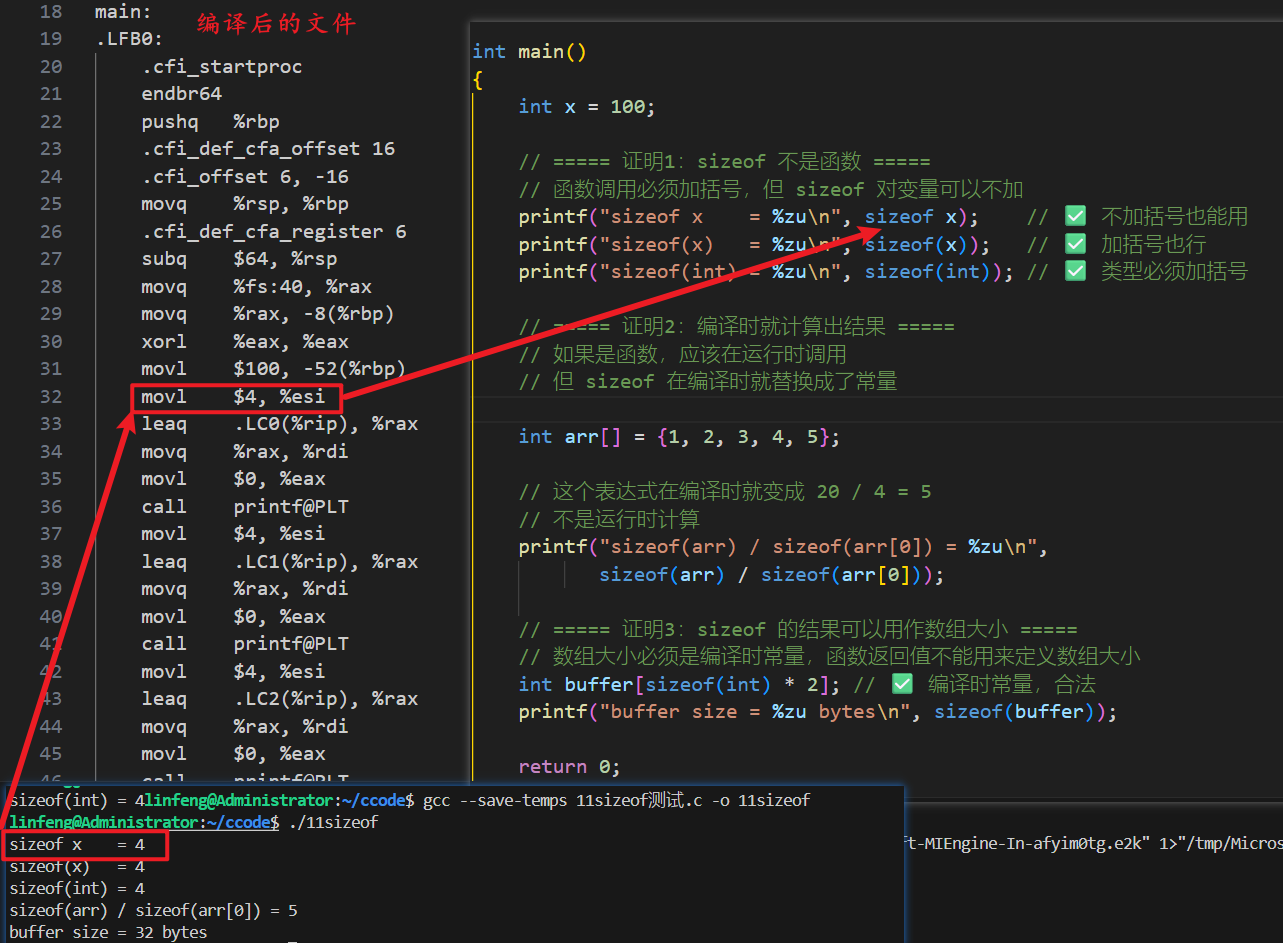
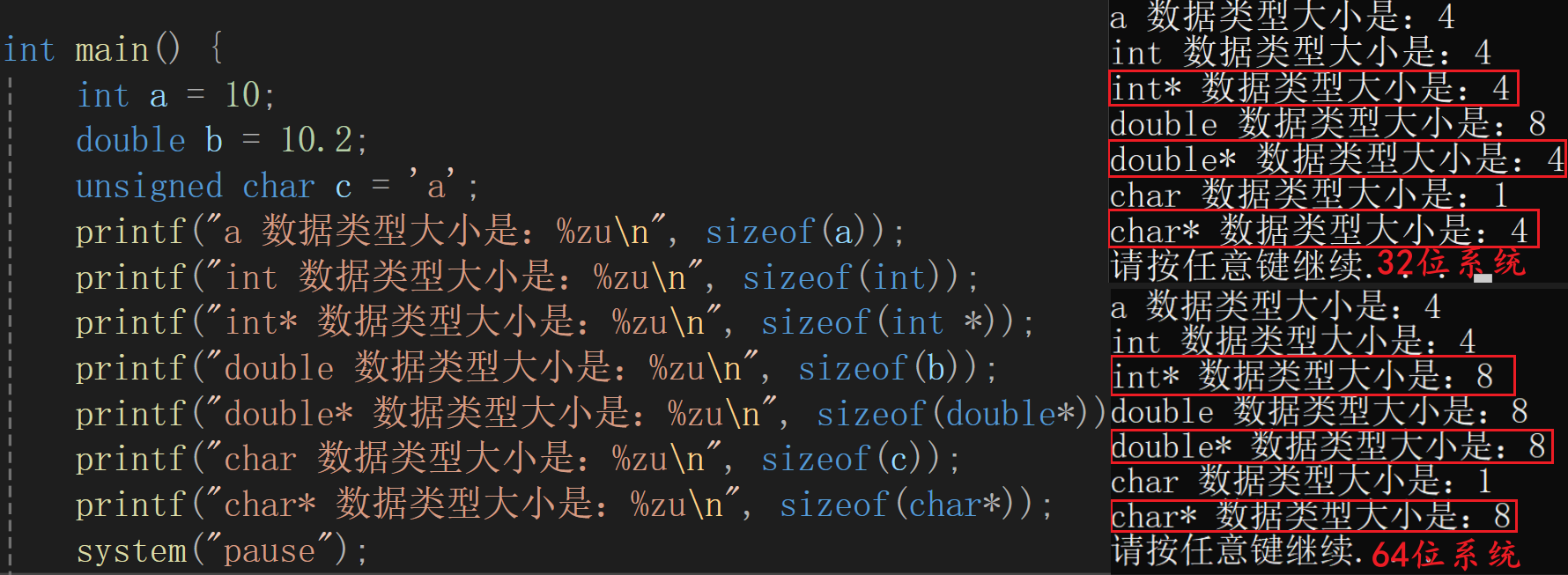
C语言字符串与sizeof解析 📋 速记 sizeof 是关键字,用来计算对象或类型占用的字节数。 C 语言字符串本质是以 \\0 结尾的 char 数组。 sizeof(arr) / sizeof(arr) 可以计算数组元素个数。 数组传参后会退化为指针,因此长度通常需要单独传入。 统计字符串字符个数时,应使用 strlen,而不是 sizeof。 💡 记忆口诀 sizeof 算内存,strlen 数字符;数组退指针,长度 C语言进阶 林峰 2026-03-26 724 热度 0评论
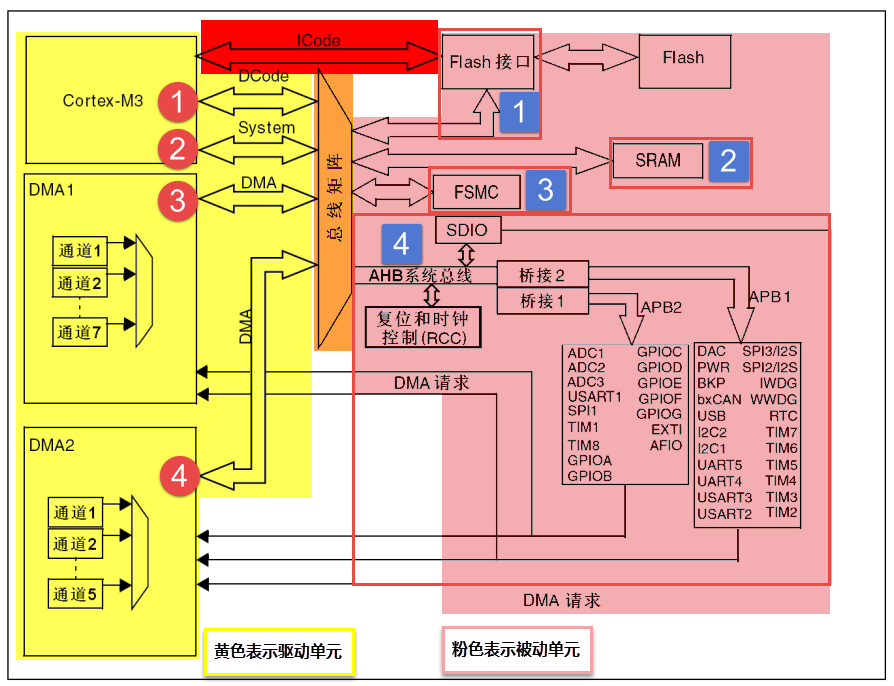
STM32 总线架构详解:ICode/DCode/System/DMA 工作原理 STM32 总线架构采用改进型哈佛架构,CPU 通过 ICode、DCode、System 三条通路工作,DMA 也能作为主设备参与访问;AHB/APB 是片上总线分层,连接不同速率的外设。本文将从访问通路和片上互连两个层次,帮你建立清晰的认知。 改进型哈佛架构:为什么要多条总线 架构 特点 冯·诺依曼 指令和数据共享一条路,易瓶颈 经典哈佛 指令和数据分路,但结构死板 STM32 改进型哈佛 统 嵌入式开发 林峰 2026-03-24 1055 热度 0评论
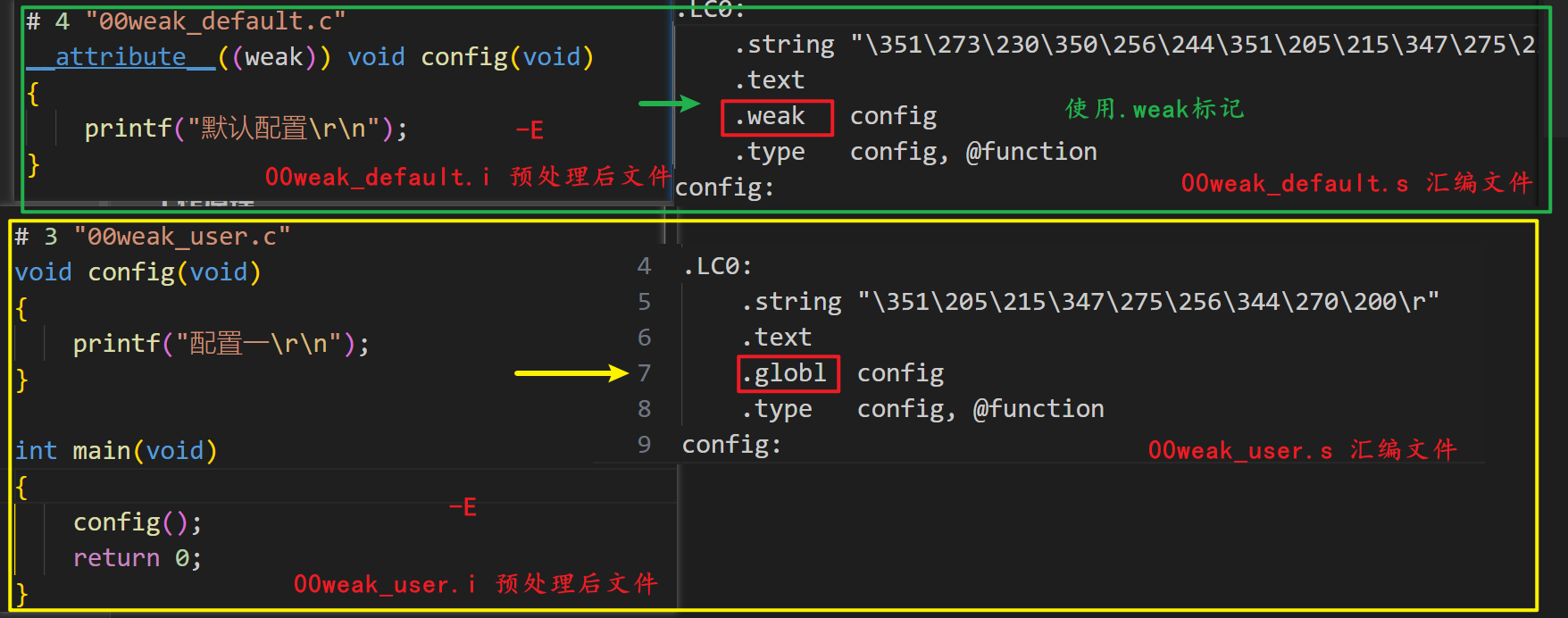
C语言弱链接函数完全指南:__weak原理与STM32实战 1. 什么是弱链接函数 __weak 修饰的函数属于弱符号,用于提供可被覆盖的默认实现。当链接时发现同名的强符号函数,链接器会优先使用强符号,弱符号被忽略。 ℹ️ 典型应用:HAL 库提供空的弱回调函数,用户在自己的代码中实现同名函数即可覆盖,无需修改库代码。 2. 语法格式 GCC 原生语法是 __attribute__((weak)),通常会自定义宏 __weak 来简化使用: #define C语言进阶 林峰 2026-03-20 542 热度 0评论
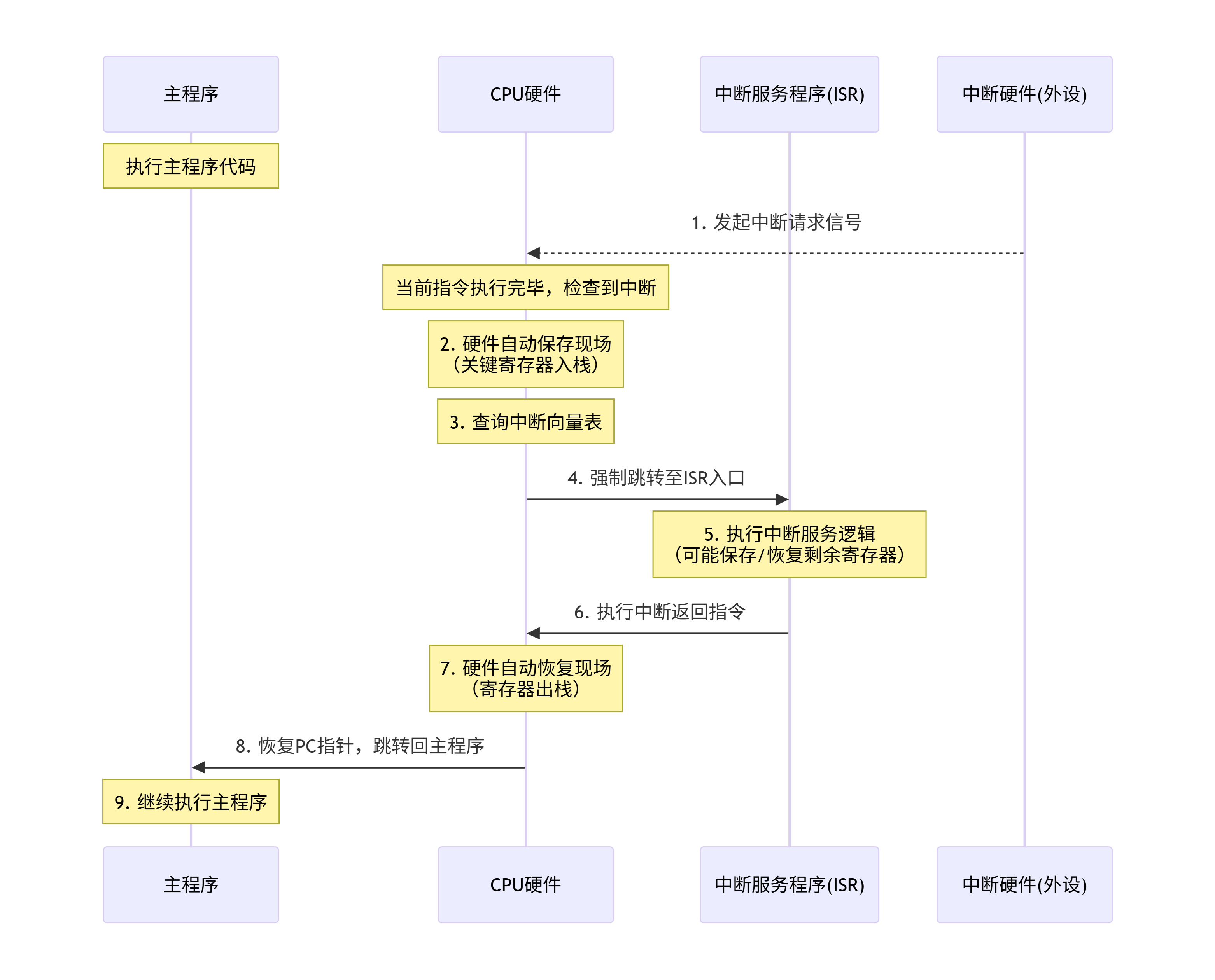
STM32 中断系统详解:NVIC、EXTI、优先级分组与 HAL 库实战 STM32 中断系统详解 1. 什么是中断? CPU 正在执行主程序,突然外部或内部事件发生(按键按下、定时器溢出、串口收到数据……),CPU 暂停当前工作,跳去处理紧急事件,处理完再回来继续。 中断响应与返回流程 💡 核心思想:中断让 CPU 不用\"傻等\",而是事件驱动——有事才处理,没事干正事。 2. NVIC — 嵌套向量中断控制器 NVIC = Nested Vectored Interr 嵌入式开发 林峰 2026-03-17 2219 热度 0评论
C语言指针详解(下):空指针、野指针、悬空指针与嵌入式实战 C语言指针详解(下)— 安全与嵌入式实战 ℹ️ 导读:本篇讲解指针的安全使用和嵌入式实战。指针基础概念与语法请看《C语言指针详解(上)》。 一、空指针(NULL Pointer) 1.1 定义 空指针是一个不指向任何有效内存地址的指针,其值为 NULL(即 0)。它是 C 语言中表示"指针当前没有指向任何东西"的标准方式。 #include <stdio.h> #i C语言进阶 林峰 2026-03-17 701 热度 0评论
C语言指针详解(上):指针变量、函数指针 C语言指针详解(上):指针变量、函数指针 本篇讲解指针的核心概念与使用方法。关于指针安全(空指针、野指针)和嵌入式实战用法,请看《C语言指针详解(下)》。 一、指针基础 1.1 定义 指针变量是一个特殊的变量,它存储的值是另一个变量的内存地址(即地址编号),而不是数据本身。我们平时说的"指针",通常指的就是这个地址值本身。 ℹ️ 指针 vs 指针变量 指针:一个内存地址(一个数 C语言进阶 林峰 2026-03-17 1153 热度 0评论