Photoshop使用笔记 Photoshop 常用快捷键整理 所有快捷键适用于 Windows(Mac 对应 Cmd 替换 Ctrl,Option 替换 Alt)。这些是默认设置,可在 Edit > Keyboard Shortcuts 中自定义。 1. 选区(Selection)相关 Ctrl + D:取消选区(Deselect) Shift(使用选框工具时按住):添加选区(Add to Selection) Al 笔记 林峰 2025-12-16 572 热度 0评论
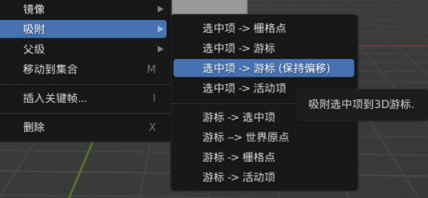
Blender 吸附(Snapping) Blender 吸附(Snapping) Blender 的吸附功能常用于:精准对齐、机械/建筑建模、确保物体间位置关系严格一致。 Blender 中吸附有 两大类别: 一、点到点吸附(Point-to-Point Snap) 适用于多个物体整体对齐,但 保留它们之间的相对位置关系(偏移)。 image-20251201220345768 核心思想: 计算当前选中物体的 中点(Median Poi 3D打印 林峰 2025-12-01 1364 热度 0评论
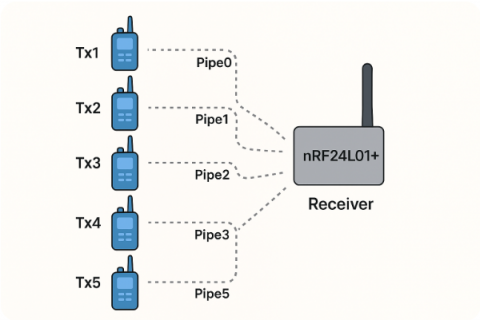
NRF24L01 无线通信(一、理论篇) 一、NRF24L01 简介 NRF24L01 是一款 2.4GHz 的无线收发芯片,工作在 2.4~2.5GHz 世界通用 ISM 频段的单片无线收发器芯片。特点: 1.1 工作频段 频率范围:2.400 GHz ~ 2.525 GHz(ISM 免授权频段) 频率通道:共 125 个通道,每个通道间隔 1 MHz 频率(MHz) = 2400 + Channel 例如: 通道 0 → 2.400 嵌入式开发 林峰 2025-11-26 865 热度 0评论
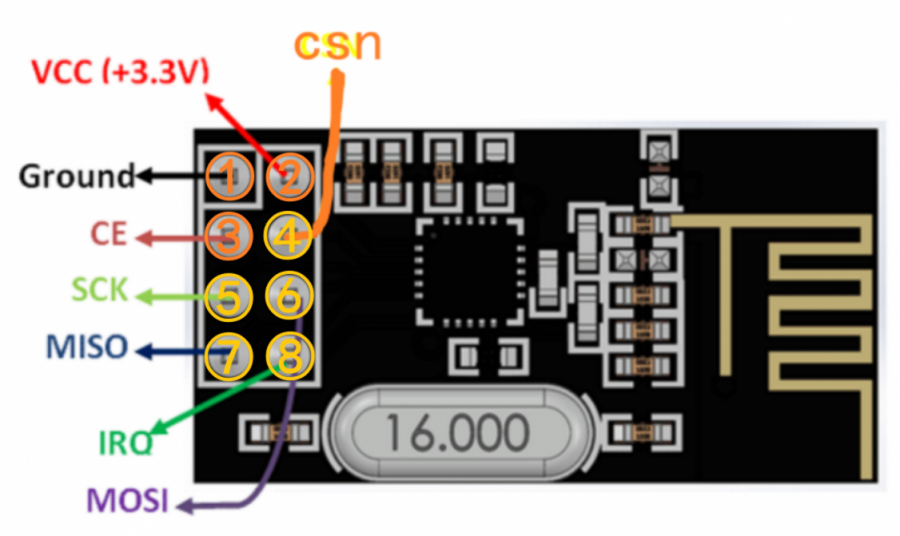
Arduino NRF24L01 无线通信笔记(二、代码实战篇) Arduino × NRF24L01 无线通信笔记 一、NRF24L01 简介 NRF24L01 是一款基于 2.4GHz 的无线收发芯片,工作在 2.4~2.5GHz 世界通用 ISM 频段的单片无线收发器芯片。特点: 体积小,功耗低 速度可达 2Mbps 点对点、多点通信都可以 距离根据模块不同从 几十米 → 几百米(PA+LNA 版本更远) SPI 接口,Arduino 驱动简单 NRF24 嵌入式开发 林峰 2025-11-25 902 热度 0评论
Excel VLOOKUP 函数详解 1. VLOOKUP 函数参数列表(共4个) =VLOOKUP( lookup_value , table_array , col_index_num , ) 参数序号 参数名称 英文原名 是否必填 说明 1 查找值 lookup_value 必填 要查找的内容(数字、文本、单元格引用) 2 查找区域(表格区域) table_array 必填 数据区域,查找值必须出现 笔记 林峰 2025-11-24 837 热度 0评论
Node-RED:Function 节点与变量使用范围笔记 一、Function 节点的代码运行环境 Node-RED是一个物联网可视化编程工具,用于事件驱动应用程序的低代码编程。 Node-RED 的 Function 节点运行在 Node.js 的沙盒环境中,它不是一个完整的 JavaScript 文件,而是 Node-RED 在运行时将你的代码嵌入到一个安全沙盒中执行。 Node-RED 的函数( Function )节点用于编写 JavaScrip 代码开发 林峰 2025-11-23 1062 热度 0评论
ESP32-C2 + MicroPython + MQTT 完美接入 Home Assistant ESP32-C2 + MicroPython + MQTT 完美接入 Home Assistant(含 Node-RED 双向同步) 简介:ESP32-C2(MicroPython)通过 MQTT 控制灯并与 Home Assistant、Node-RED 完全双向同步的全流程 1.Home Assistant 添加 MQTT 手动实体写法 官方文档链接:MQTT Light - Home Ass 嵌入式开发 林峰 2025-11-22 1190 热度 0评论
周期信号的傅里叶级数表示方式 周期信号的傅里叶级数并不是只有一种写法,常见 三种等价表示方式: 三角形式(正弦 + 余弦) 指数形式(复指数) 幅度相位形式(单正弦) 它们完全等价,只是形式不同,适用于不同的分析场景。 一、三角形式(最经典、最直观) 把信号分解成“余弦 + 正弦”的组合。 行间公式如下: x(t) = a_0 + \\sum_{n=1}^{\\infty} \\left 信号处理算法 林峰 2025-11-19 878 热度 0评论
SolidWorks 特征笔记:扫描(Sweep)与放样(Loft) SolidWorks 特征笔记:扫描(Sweep) vs 放样(Loft) 一、两者本质区别(一句话) 扫描(Sweep):一条轨迹 + 一个截面,截面沿路径“走”出来。 放样(Loft):多个截面之间“顺滑过渡”,不依赖路径。 二、扫描(Sweep) 1. 概念 扫描是在 一条路径(Path) 上 拖动一个截面(Profile) 得到的三维形体。 可以理解为:沿着轨迹挤出。 Sweep 本质就是 机械设计 林峰 2025-11-16 841 热度 0评论