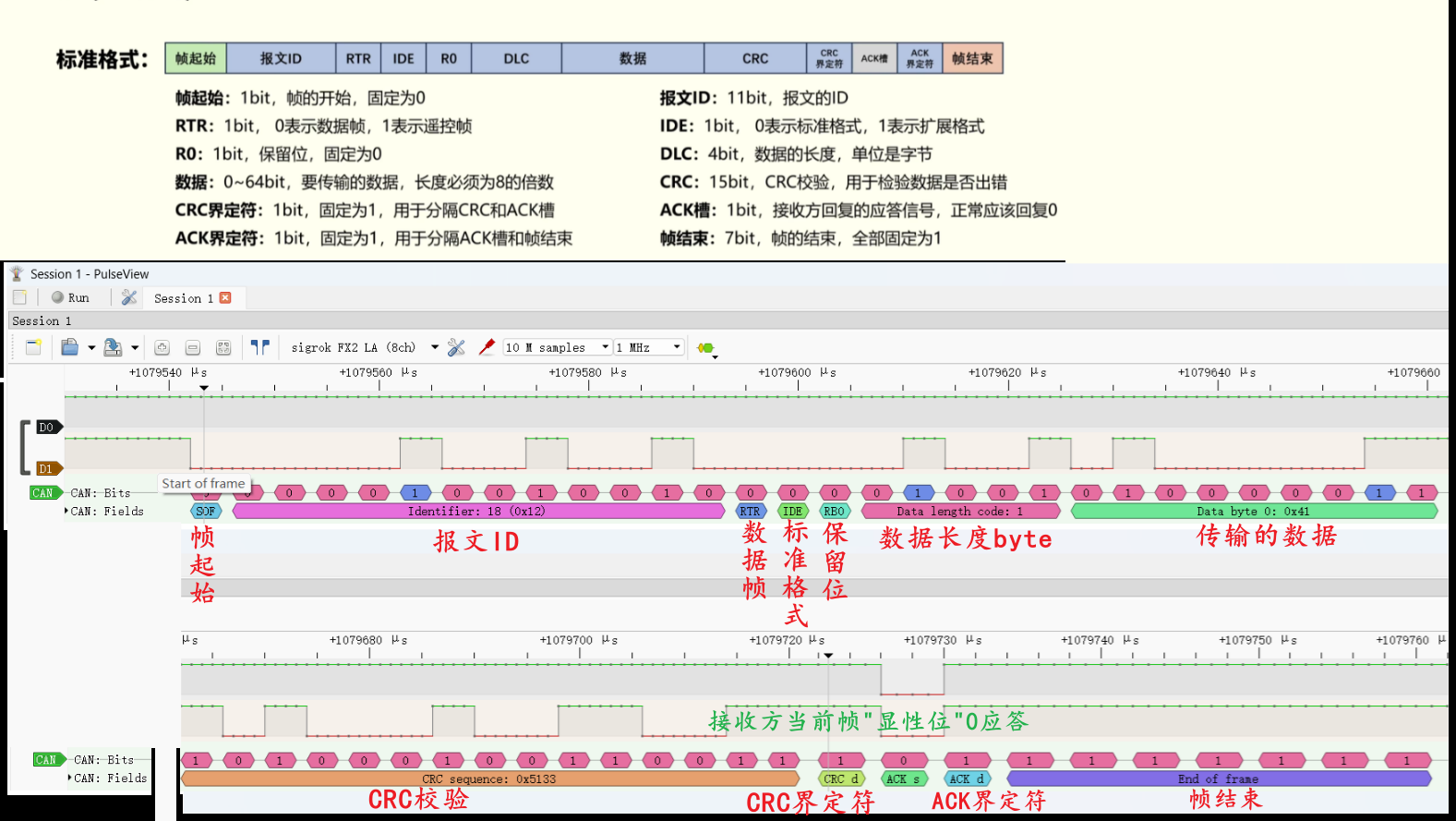
通信协议篇四:CAN 总线原理与通信机制基础详解 CAN(Controller Area Network,控制器局域网)是 Bosch 在 1980 年代提出的一种高可靠串行总线。它采用差分传输,支持多主通信,通过报文 ID 完成仲裁,并带有较完整的错误检测机制。 ℹ️ 本文范围:本文主要介绍经典 CAN。文中会顺带提到 CAN FD 和 CAN 2.0A / 2.0B,但重点仍然是基础概念、帧格式、仲裁和同步机制。 1. 特点与应用背景 CAN 电子技术 林峰 2026-04-06 1889 热度 0评论
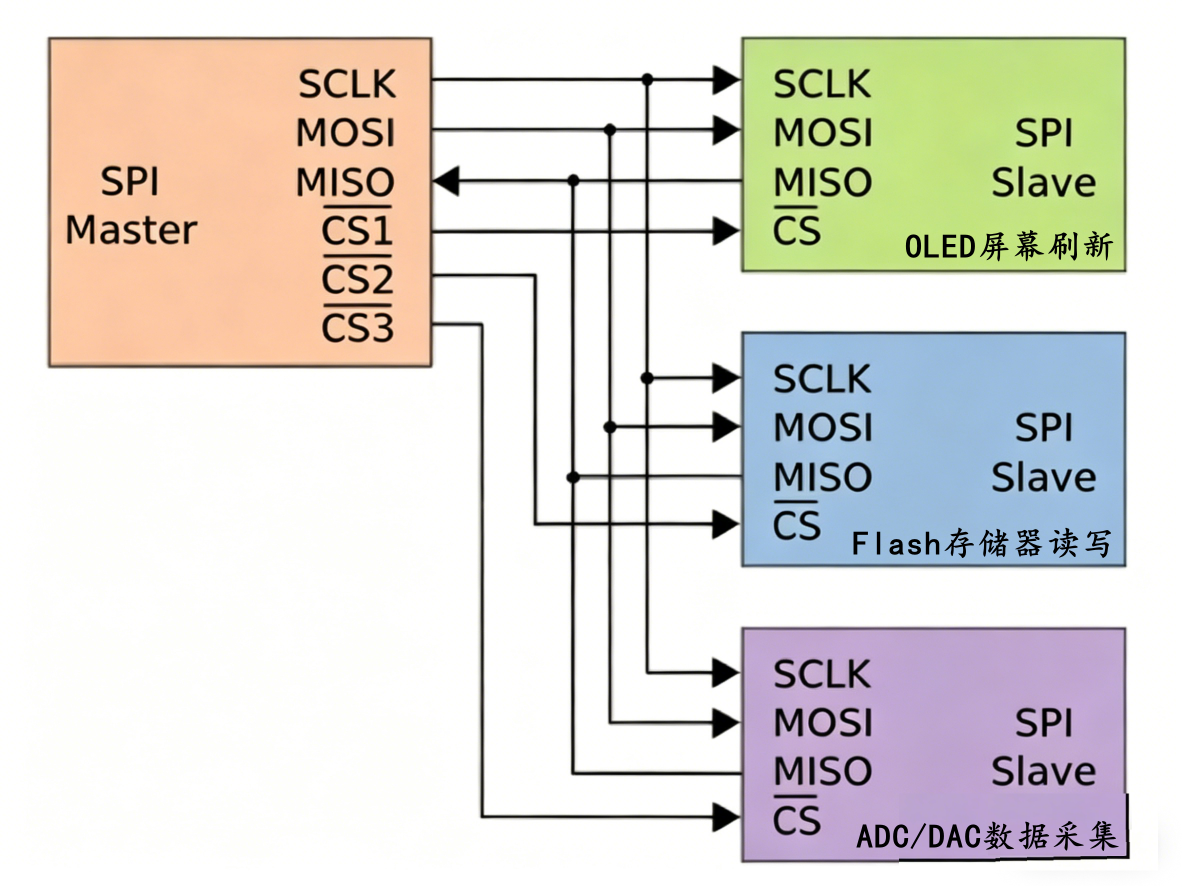
通信协议篇三:SPI 通信原理详解之时钟模式、时序与W25Q32示例 SPI 是嵌入式开发里最常见的高速串行总线之一。相比 I2C 和 UART,SPI 结构更直接、速度更高,也更适合和 Flash、ADC、DAC、显示屏等板级外设通信。本文从底层原理、时钟模式、通信时序到 W25Q32 读 ID 实验,系统讲清 SPI 到底是怎么工作的。 ℹ️ 一句话先讲清楚:SPI(Serial Peripheral Interface,串行外设接口)是最早由摩托罗拉(Moto 嵌入式开发 林峰 2026-04-06 2218 热度 3评论
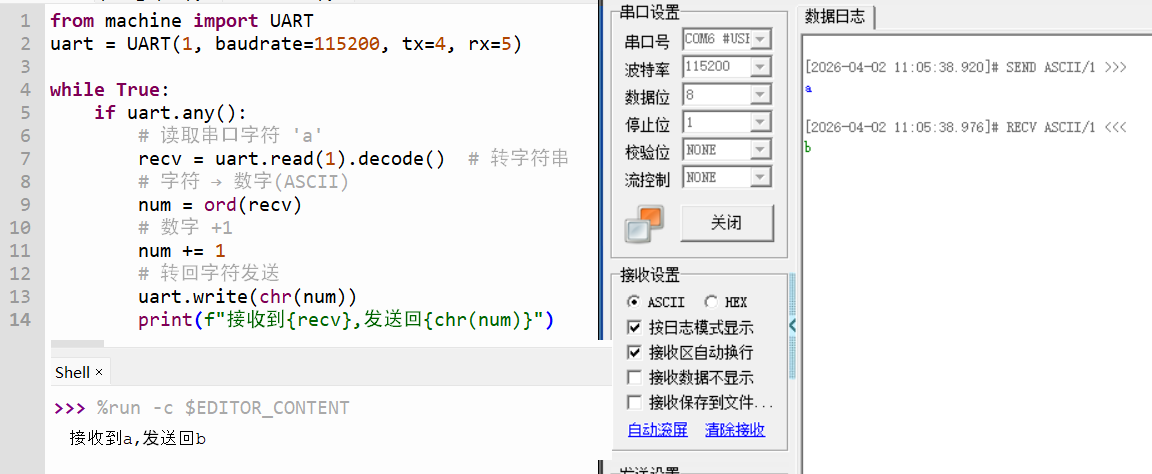
通信协议篇三:USART 串口通信原理详解从帧结构示波器逻辑分析仪波形分析到代码原理 异步串口是嵌入式里最常见的通信方式之一。它硬件简单、成本低、调试方便,既能做日志输出,也能连接上位机、蓝牙、WiFi、GPS、4G 等外设。本文把 USART / UART 的核心概念、帧结构、采样机制、调试方法和实战代码压缩到一篇里,尽量做到好查、好记、好用。 ℹ️ 先记住一句话:日常开发里说的“串口通信”,大多数场景其实就是 USART 的异步模式,常见连线只有 TX、RX 和 GND。 1. 电子技术 林峰 2026-04-02 1073 热度 0评论
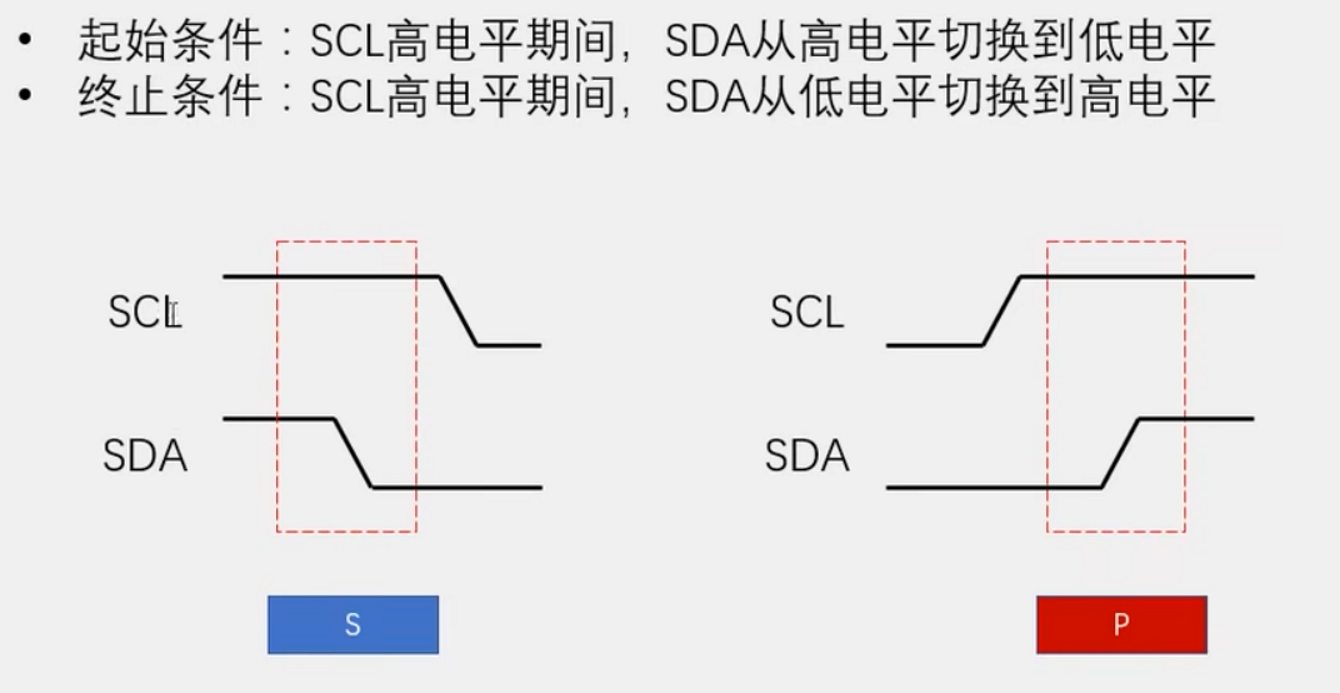
通信协议篇二:I2C 通信协议详解 I2C 通信协议(Inter-Integrated Circuit)是飞利浦设计的两线同步串行总线,仅用 SCL(时钟)和 SDA(数据)两根线即可实现一主多从通信。本文结合 ESP32-C3 + SHT40 实战,从 I2C 通信协议时序原理到 MicroPython 代码逐层拆解。 一、I2C 通信时序详解 ℹ️ 四个核心信号 信号 解决的问题 触发条件 START 通信开始边界 SCL 高电 嵌入式开发 林峰 2026-03-30 992 热度 0评论
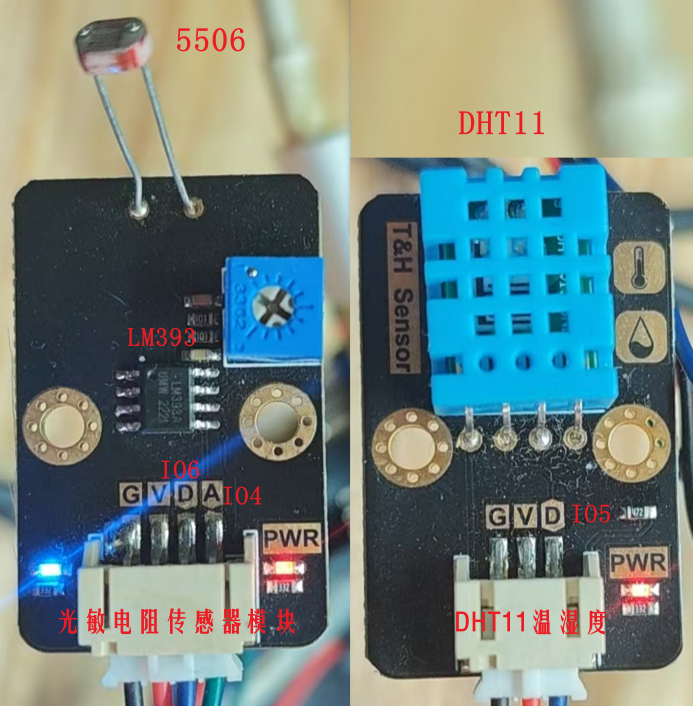
通信协议篇一:温湿度传感器 DHT11单总线时序详解 通信协议篇二温湿度传感器 DHT11 的时序是理解这个模块的关键。只要搞懂单总线空闲高电平、主机起始信号、传感器响应信号,以及 40 位数据格式,就能更轻松地看懂逻辑分析仪波形,也能理解 ESP32 / MicroPython 代码为什么这样写。 dht11 sensor module overview ℹ️ 核心结论:DHT11 的 DATA 单总线在空闲状态下保持高电平。主机先拉低总线发起通信 嵌入式开发 林峰 2026-03-28 773 热度 0评论
嵌入式通信基础概念 嵌入式通信基础概念 在深入各种总线之前,先把几个容易混淆的基础概念彻底搞清楚。这些是理解所有通信协议的"元知识"。 1. 同步 vs 异步:到底谁在"喊节拍"? ℹ️ 一句话区别:有没有一根专门的时钟线来统一收发双方的节奏。 对比项 同步通信 异步通信 时钟线 有(如 I2C 的 SCL、SPI 的 SCLK) 没有 同步方式 主机通过时钟线"喊节 嵌入式开发 林峰 2026-03-11 492 热度 0评论
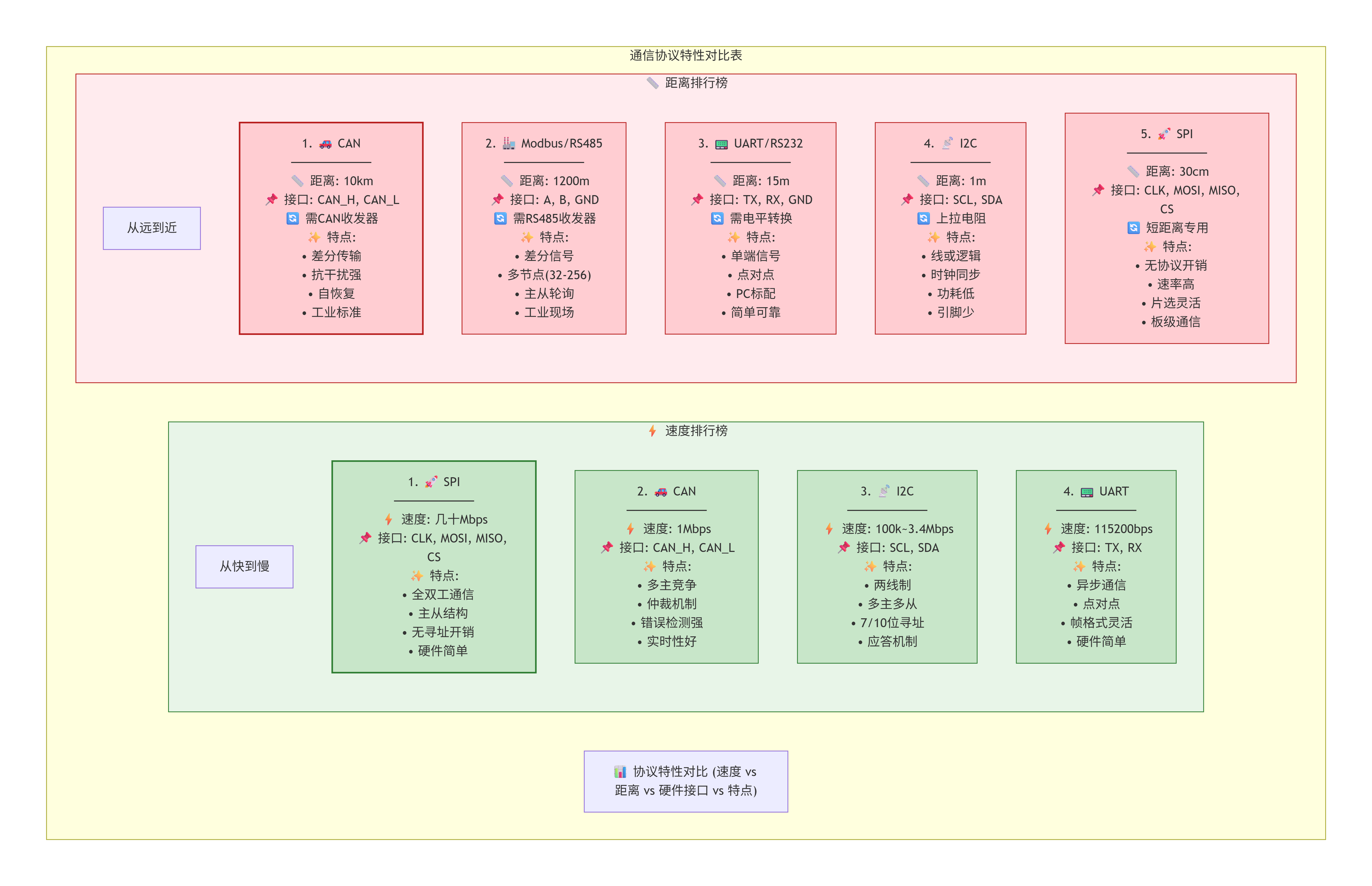
嵌入式通信协议UART、I2C 、SPI、CAN、Modbus总线协议区别 嵌入式常用总线特点与区别 前置知识: 先搞懂同步/异步、串行/并行、全双工/半双工、差分/单端信号等基础概念,后面的协议就能秒懂《 👉 通信基础概念》 一览表(速查) 特性 UART I2C SPI CAN Modbus 全称 Universal Asynchronous Receiver/Transmitter Inter-Integrated Circuit Serial Peripheral 嵌入式开发 林峰 2026-03-09 2790 热度 0评论