Arduino 与 MicroPython 基础入门:PWM、GPIO、ADC、串口、Socket 与计时基础
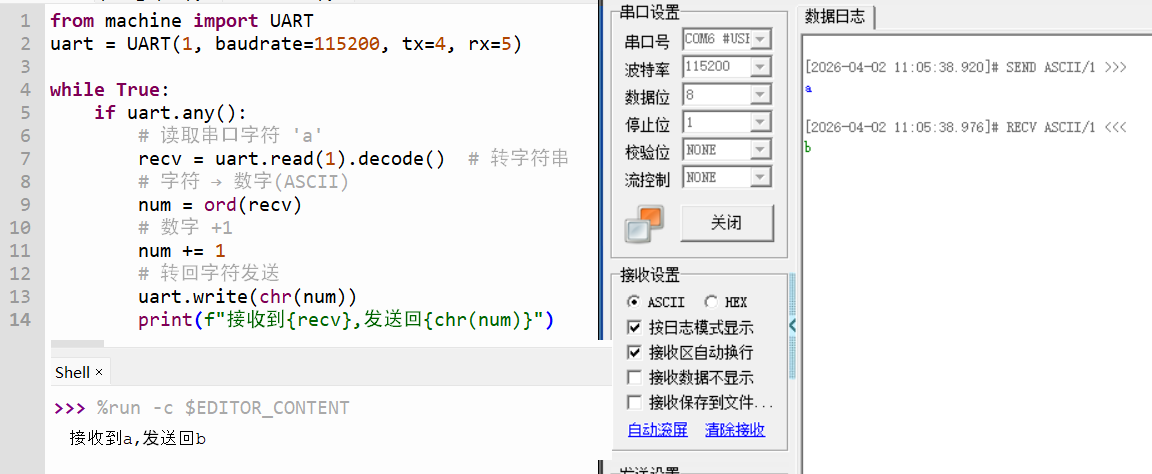
这篇笔记整理了 Arduino UNO 与 ESP32-C3 MicroPython 开发里最常用的基础知识,包括 PWM、时间函数、GPIO、ADC、多线程、串口、Socket 以及 Arduino 常见数值类型。内容尽量保持“短、准、方便查阅”,适合作为入门和速查参考。 一、PWM 输出基础: Arduino analogWrite() 与 MicroPython PWM PWM(脉宽调制)通