通信协议篇四:CAN 总线原理与通信机制基础详解
- 未分类
- 13小时前
- 27热度
- 0评论
CAN(Controller Area Network,控制器局域网)是 Bosch 在 1980 年代提出的一种高可靠串行总线。它采用差分传输,支持多主通信,通过报文 ID 完成仲裁,并带有较完整的错误检测机制。
1. 特点与应用背景
CAN 的几个典型特点:
- 差分传输:抗干扰能力强
- 多主通信:多个节点可共享同一总线
- 优先级仲裁:通过报文 ID 决定先发谁
- 错误检测较完整:有 CRC、ACK、位填充、帧检查等机制
常见场景有汽车电子、工业控制、医疗设备等。
2. 先分清几组常见说法
- 经典 CAN(Classical CAN):单帧数据最长 8 字节
- CAN FD(Flexible Data-Rate):支持更长数据段和更高数据阶段速率
- CAN 2.0A / 2.0B:常见旧写法;通常可理解为 2.0A 主要对应 11 位标准帧,2.0B 支持 29 位扩展帧
3. CAN 的核心概念
| 概念 | 含义 | 重点记忆 |
|---|---|---|
| 标准帧 | 11 位 ID | 常见、开销更小 |
| 扩展帧 | 29 位 ID | 可表示更多报文类型 |
| 显性位 | 逻辑 0 | 仲裁里更“强” |
| 隐性位 | 逻辑 1 | 遇到显性位会失败 |
| ACK | 应答位 | 至少有一个节点正确接收才会响应 |
| 滤波器 | 决定接收哪些 ID | 提高处理效率 |
| FIFO | 接收缓存队列 | 常用 FIFO0 / FIFO1 |
| Mailbox | 发送邮箱 | 发送缓存单元 |
4. CAN 数据帧格式
经典 CAN 中,标准数据帧最常见,可简化理解为:
SOF -> ID -> RTR -> IDE -> r0 -> DLC -> DATA -> CRC -> ACK -> EOF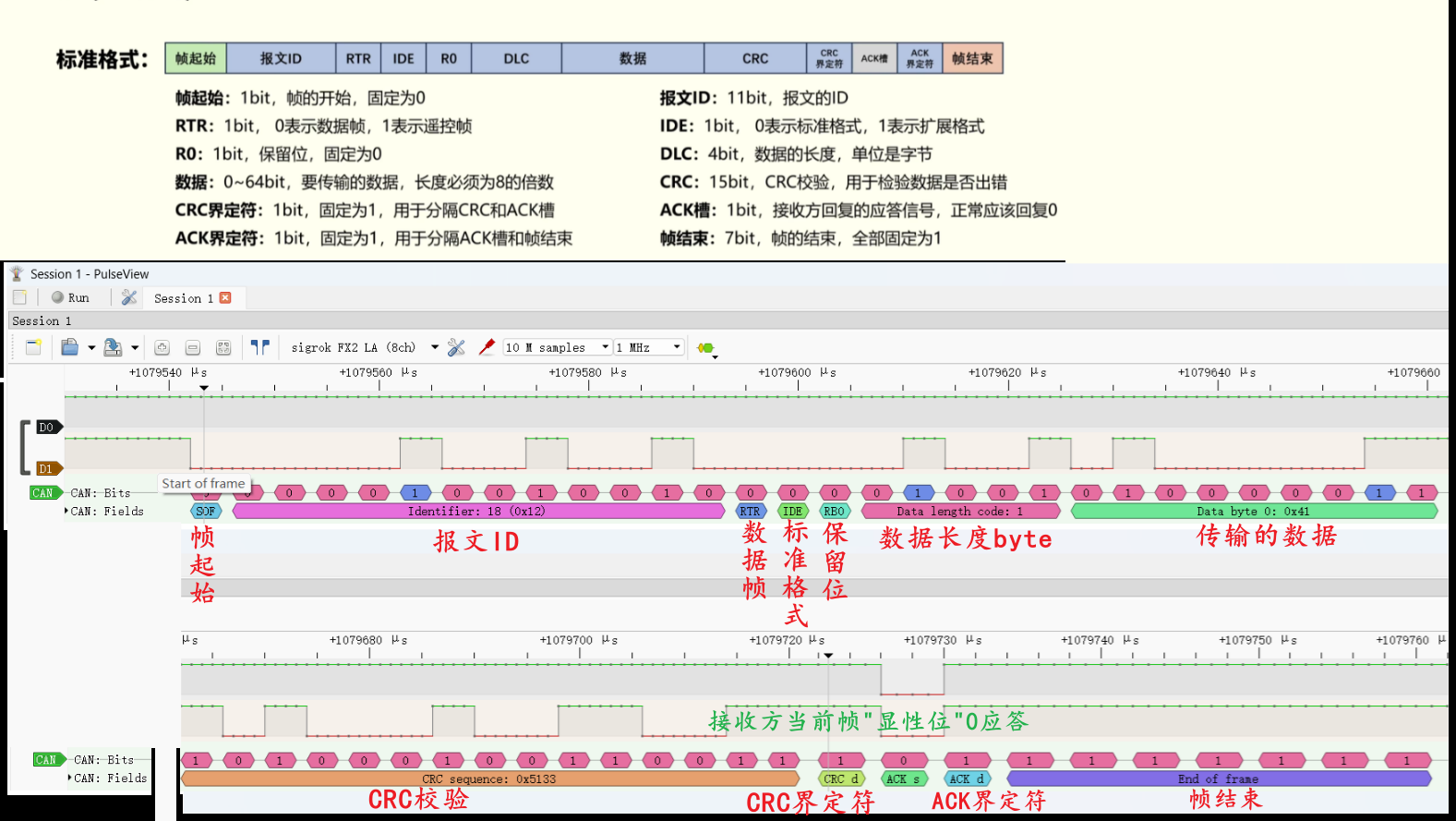
4.1 标准数据帧字段总览
| 字段 | 英文全称 | 位数 | 主要作用 | 关键说明 |
|---|---|---|---|---|
| SOF | Start of Frame | 1 | 帧起始 | 1 位显性位,表示一帧开始 |
| ID | Identifier | 11 | 标识报文并参与仲裁 | ID 越小,优先级越高 |
| RTR | Remote Transmission Request | 1 | 区分数据帧与远程帧 | 0=数据帧,1=远程帧 |
| IDE | Identifier Extension | 1 | 区分标准帧与扩展帧 | 标准帧中该位用于标识标准格式 |
| r0 | Reserved Bit | 1 | 保留位 | 经典 CAN 中通常保留 |
| DLC | Data Length Code | 4 | 表示数据长度 | 经典 CAN 取值 0~8 |
| DATA | Data Field | 0~8 字节 | 有效载荷 | 真正需要传输的数据内容 |
| CRC | Cyclic Redundancy Check | 15+1 | 差错检测 | 含 CRC 序列和 CRC 界定符 |
| ACK | Acknowledge | 1+1 | 接收确认 | 接收方在当前帧里的位级回应;至少 1 个节点正确收到后,会在 ACK Slot 把总线拉成显性位 |
| EOF | End of Frame | 7 | 帧结束 | 7 位隐性位,表示该帧结束 |
4.2 常见帧类型
| 帧类型 | 含义 | 说明 |
|---|---|---|
| 数据帧 | 真正承载数据 | 最常用 |
| 远程帧 | 请求对方发送数据 | 自己不带数据 |
| 错误帧 | 节点检测到通信错误时发出 | 用于通知本次通信无效 |
| 过载帧 | 用于延迟下一帧发送 | 基础阶段了解即可 |
4.3 看一帧报文先看什么
平时看报文,通常先看这 3 个字段:
- ID:表示报文类型,也决定优先级
- DLC:表示数据长度
- DATA:实际数据内容
扩展帧的基本思路和标准帧一致,只是把 ID 从 11 位扩展到 29 位。它只是 ID 更长,不等于 CAN FD。
5. CAN 的基础硬件认识
5.1 CAN 控制器与 CAN 收发器
| 模块 | 作用 |
|---|---|
| CAN 控制器 | 组帧、仲裁、错误检测、滤波、收发缓存管理 |
| CAN 收发器 | 在 MCU 逻辑电平和 CAN 差分信号之间做转换 |
很多 MCU 只集成 CAN 控制器,不包含物理层收发器,所以接实际总线时通常还要外接 CAN 收发器。
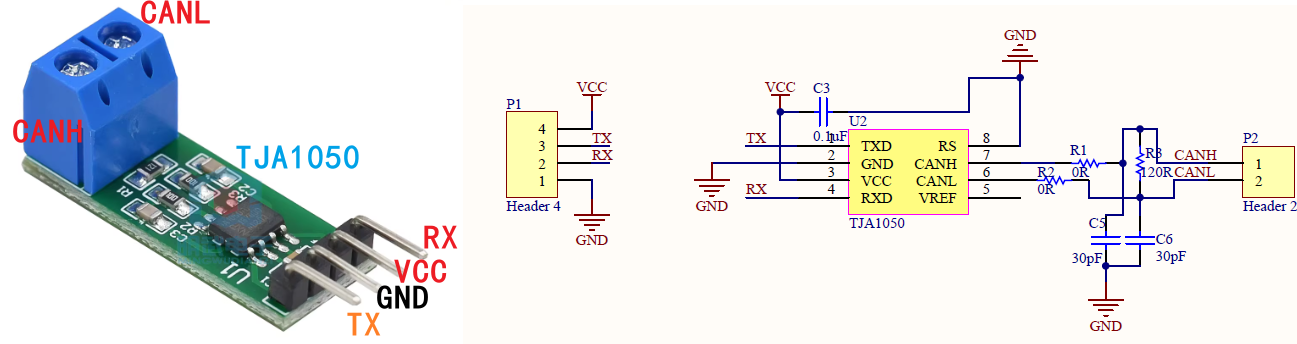
常见收发器:
TJA1050MCP2551SN65HVD230
5.2 总线连接方式
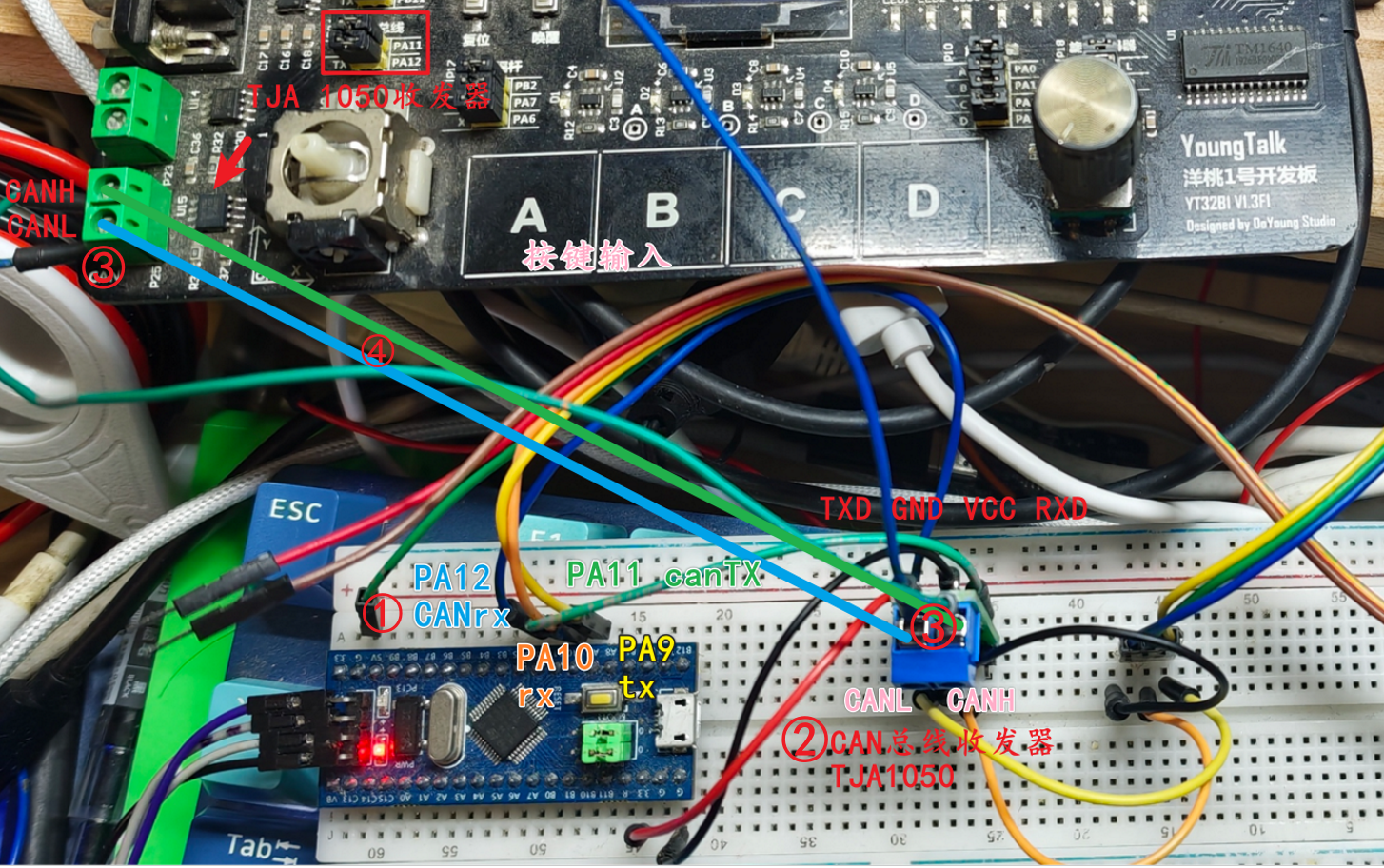
MCU(CAN_TX/CAN_RX)
│
▼
CAN 收发器
│
CAN_H CAN_L
│
===== 总线 =====总线两端通常各接一个 120Ω 终端电阻,作用主要是:
- 阻抗匹配
- 抑制信号反射
- 提高信号完整性
两端各 120Ω,中间节点一般不加。
6. CAN 为什么能自动分优先级
CAN 的关键机制是仲裁。
6.1 显性位、隐性位与线与效果
在 CAN 总线上:
- 显性位 = 0
- 隐性位 = 1
它在逻辑效果上类似线与:
- 只要有节点发显性位
0,总线就是显性位0 - 只有所有节点都发隐性位
1,总线才是隐性位1
直接记:0 会覆盖 1。
6.2 发送并回读
CAN 节点发送时会边发边回读总线。
如果某个节点:
- 自己发的是隐性位
1 - 回读到的却是显性位
0
就说明别的节点优先级更高,当前节点立即退出仲裁。
6.3 为什么 ID 越小优先级越高
ID 是逐位参与仲裁的,而仲裁依赖:
- 显性位
0会覆盖隐性位1 - 节点会实时回读总线状态
所以更早出现显性位 0 的报文更容易保住仲裁权。
例如:
0x100优先级高于0x200- ID 数值越小,优先级越高
6.4 什么叫非破坏性仲裁
多个节点同时发时:
- 胜出的节点继续正常发送
- 失败的节点立即退出
- 已发出的有效位流不会被破坏
这就是非破坏性仲裁。
谁先保住显性位,谁继续发;谁发隐性却读到显性,谁退出。
7. 相关概念:位填充、错误状态、滤波器
7.1 同步与位填充
CAN 没有独立时钟线,节点只能靠各自本地时钟工作。若一帧里长期没有电平跳变,采样点就可能慢慢漂移。
所以 CAN 要解决两个问题:
- 一帧开始时先对齐时间基准
- 传输过程中如果有漂移,还要继续修正
对应机制:
- 硬同步:通常在检测到 SOF 边沿时进行
- 再同步:后续检测到边沿时继续微调采样点
- 位填充:连续 5 个相同位后,自动插入 1 个相反位,用来制造边沿
位填充规则被破坏,就会判定为 Stuff Error。
7.2 错误状态
CAN 节点会根据错误计数器进入不同状态:
- Error Active:正常工作,能主动报错
- Error Passive:还能通信,但行为受限
- Bus-Off:错误太多,被强制退出总线
这样可以避免异常节点一直拖垮整条总线。
7.3 滤波器
CAN 是广播式通信,总线上所有节点都能看到报文,但并不是所有报文都要处理。
所以 MCU 通常会用滤波器筛选自己关心的 ID,例如:
- 只接收
0x123 - 只接收某一类 ID 范围
8. CAN 的优点与局限
8.1 优点
- 抗干扰强
- 多节点共享总线
- 自带优先级仲裁
- 错误检测机制较完整
- 可靠性高,适合工业与汽车场景
8.2 局限
- 经典 CAN 单帧数据只有 8 字节
- 速率和距离存在权衡
- 调试门槛高于 UART
- 工程上还要考虑收发器、终端电阻、滤波器、波特率等问题
9. 常见问题整理
9.1 CAN 和 UART / SPI / I2C 的区别
CAN 不追求最简单,也不追求最高速,重点是高可靠、多主通信和仲裁机制。
9.2 120Ω 终端电阻的作用
作用就是阻抗匹配,减少反射,保证信号完整性,所以总线两端通常各接一个 120Ω 电阻。
9.3 为什么适合汽车和工业控制
因为它同时有:
- 差分传输带来的抗干扰能力
- 多主仲裁带来的实时性
- 错误检测机制带来的可靠性
10. 速记版
- 物理层:
CAN_H / CAN_L差分信号 - 硬件结构:CAN 控制器 + CAN 收发器 + 两端 120Ω
- 优先级规则:ID 越小,优先级越高
- 经典 CAN 数据长度:最大 8 字节
- ACK:接收方在当前帧里的位级回应,不是额外再回一帧
- 同步方式:靠边沿,不靠独立时钟线
- 核心可靠性来源:差分传输 + 仲裁机制 + CRC / ACK / 位填充
STM32 配置、接线、代码、中断和调试内容可单独整理为 CAN 实战篇。

 SummerGao
已添加贵站:https://www.summergao.com/#/about?action=showFriendLink
SummerGao
已添加贵站:https://www.summergao.com/#/about?action=showFriendLink
